溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹“ubuntu下CLion怎么安裝配置ROS”的相關知識,小編通過實際案例向大家展示操作過程,操作方法簡單快捷,實用性強,希望這篇“ubuntu下CLion怎么安裝配置ROS”文章能幫助大家解決問題。
一 下載安裝激活clion
二 配置ros
1.配置clion的啟動方式
在主目錄打開隱藏文件.bashrc,命令是:sudo gedit ~/.bashrc 將clion的啟動文件clion.sh的路徑設置為環境變量 path 這樣在終端里,無論在哪個工作目錄下都可以輸入clion.sh即可啟動clion。
設置的代碼是:
export path=/home/zyw/clionpack/clion-2020.1.3/bin:$path 這個路徑是安裝clion的路徑,不同的人安裝的路徑可能不同
之后 source ~/.bashrc
網上其他的教程會說每次啟動clion要先進入到ros的工作空間下面,執行“source devel/setup.bash”,然后在運行clion.sh。個人感覺這種方法非常繁瑣,可以在點擊clion圖標啟動的時候就source系統環境。
找到jetbrains-clion.desktop,找不到可以搜索一下,然后用gedit打開將exec="/home/zyw/clion-2020.1.3/bin/clion.sh" %f,改成exec=bash -i -c “/home/zyw/clion-2020.1.3/bin/clion.sh” %f
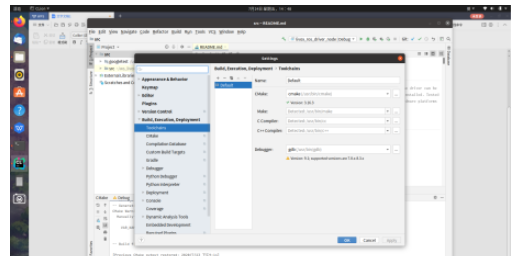
2.設置clion的cmake為本地的cmake
在終端輸入clion.sh或者點擊其圖標打開clion,在setting中打開build中的toolschain:設置cmake debugger
3.創建ros的工作區以及功能包
這個就比較簡單了,參考網上的其他教程即可 為了每次避免打開終端時都需要運行以下devel文件夾下的setup.sh文件,同樣也需要將setup.sh的路徑寫入bashrc文件中,命令為:
source /home/zyw/ws_livox/devel/setup.bash
然后source ~/.bashrc
4.在當前工作區啟動clion并且設置ros的工作路徑
同樣打開setting轉到build選項下邊,選擇cmake選項在cmake options這一個空格中設置-dvar_name的值,這里設置ros當前的工作區的devel文件夾,這個文件夾主要是放一些可執行文件的。
設置的路徑為:-dvar_name=/home/zyw/ws_livox/devel
然后設置生成路徑為:當前工作區的build文件夾,這個文件夾主要是放一些編譯產生的中間文件。我的路徑是/home/zyw/ws_livox/build

設置完這些基本上就可以正常編譯運行ros啦!
關于“ubuntu下CLion怎么安裝配置ROS”的內容就介紹到這里了,感謝大家的閱讀。如果想了解更多行業相關的知識,可以關注億速云行業資訊頻道,小編每天都會為大家更新不同的知識點。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





