溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹Clion ROS開發環境的設置方法,文中介紹的非常詳細,具有一定的參考價值,感興趣的小伙伴們一定要看完!
在源環境中啟動CLion
需要告知CLion ROS特定的環境變量。通過運行來源工作空間時,將在當前shell中檢索這些變量
source ./devel/setup.bash
為CLion提供ROS環境變量的最簡單方法是從同一個shell啟動IDE。在獲取工作空間后,您可以鍵入同一終端:
在CLion中打開一個ROS項目
在源環境中啟動CLion后,執行以下操作之一以打開ROS項目:
該CMake的工具窗口會顯示該項目加載的狀態:

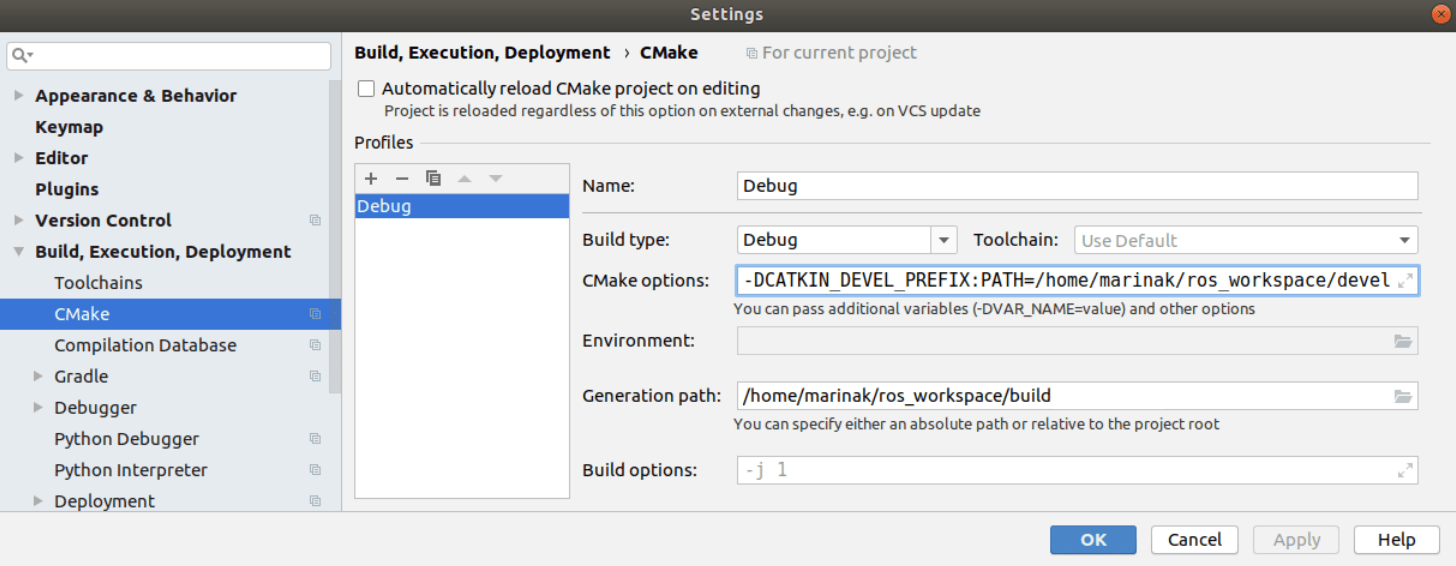
設置catkin工作空間的構建路徑
默認情況下,CLion將構建輸出放在自動創建的cmake-build-debug或cmake-build-release目錄中。對于ROS開發,這意味著您將在CLion和運行的控制臺中擁有兩個不同的版本catkin_make。
要在IDE和控制臺上進行單一構建,需要將CLion構建路徑設置為catkin工作區目錄。為此,請轉到文件|設置Ctrl+Alt+S|構建,執行,部署|CMake并更改兩個字段:
使用啟動文件
您可以在CLion中將ROS節點作為常規應用程序運行和調試。
啟動文件無法直接執行,但您可以使用XML語法突出顯示和完成編輯它們,并將調試器附加到正在運行的節點。
將調試器附加到正在運行的節點
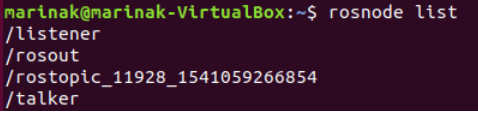
1、從命令行運行.launch文件。例如
您可以通過該rosnode list命令檢查當前運行的節點列表。在我們的示例中,列表將包含talker和listener:
2、呼叫運行|從主菜單附加到處理或按Ctrl+Alt+F5。
3、通過其PID或名稱連接到所需節點:

示例:創建基本ROS節點,在CLion中編輯并運行它
在這個例子中,我們將創建一個簡單的ROS包,編輯源代碼,并從CLion運行節點。我們將在Ubuntu 18.04上使用ROS Melodic,并在ROS wiki上使用編寫簡單發布者和訂閱者(C ++)教程的基本發布者節點。
創建一個基本的ROS包
創建和構建ROS工作區:
mkdir -p ros_workspace/srccd ros_workspace catkin_make
在工作區中,創建一個名為my_package的包:
cd src catkin_create_pkg my_package roscpp rospy std_msgs
啟動CLION
來源工作區:
cd ../../../source ./devel/setup.bash
并在同一終端啟動CLion
sh /opt/clion-2018.2/bin/clion.sh
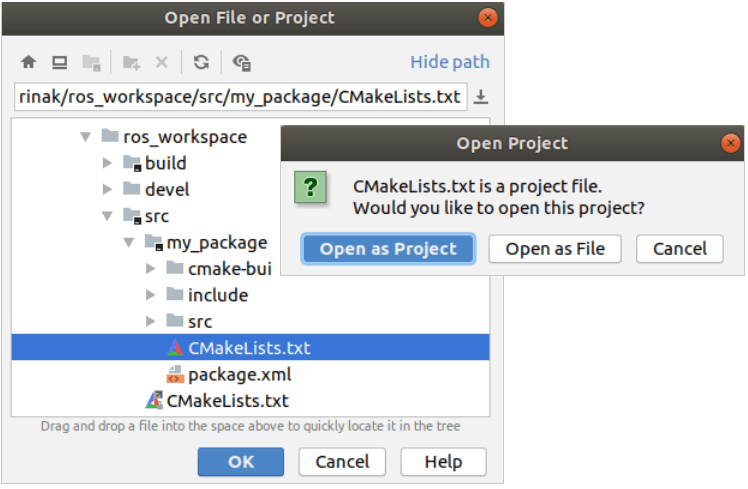
在CLion中打開包作為項目
在CLion中,轉到File |打開并選擇位于包文件夾內的CMakeLists.txt文件,然后選擇將其作為項目打開:
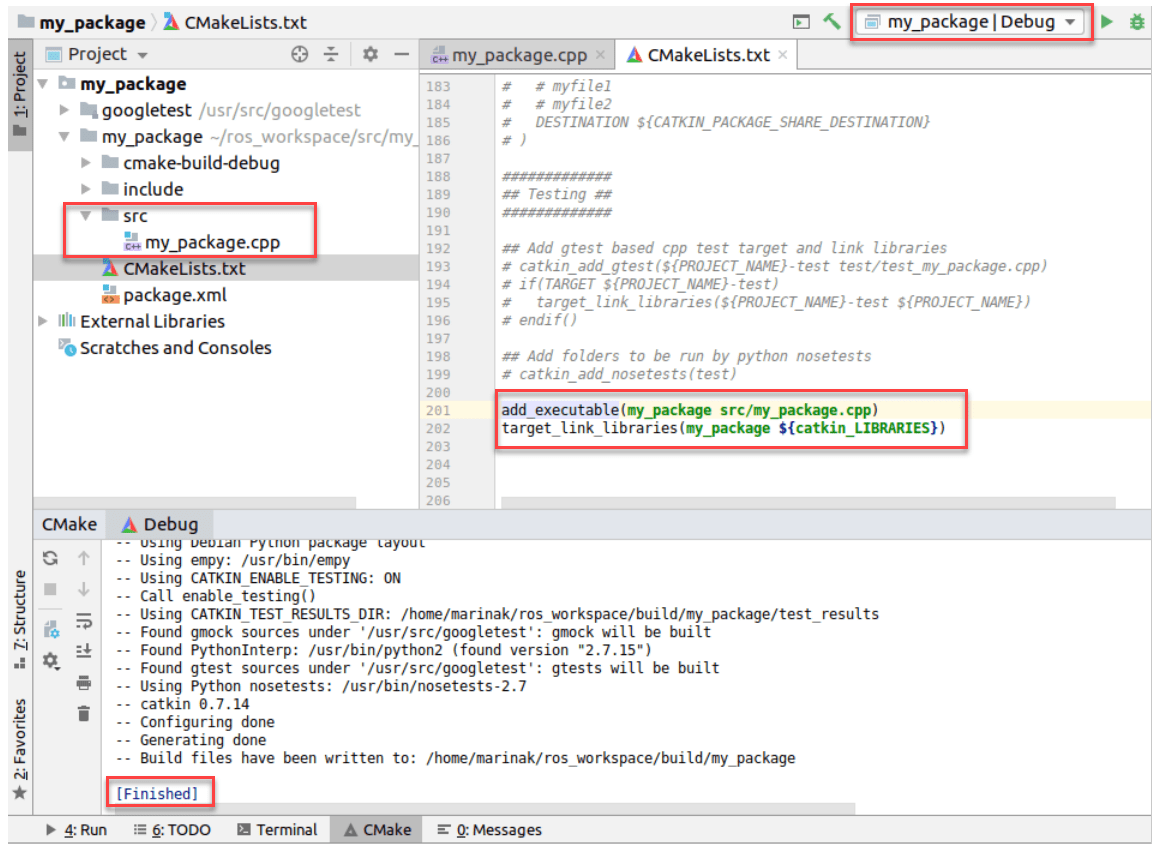
添加源文件并編輯CMakeLists.txt
向項目添加新的源文件:右鍵單擊Project樹中的src,選擇New |C / C ++源文件并將其命名為my_package.cpp。
將整個talker.cpp文件從Publisher和Subscriber教程復制到my_package.cpp中。
新創建的源添加到的CMakeLists.txt和鏈接其對應程序庫:
add_executable(my_package src/my_package.cpp)
target_link_libraries(my_package ${catkin_LIBRARIES})之后,重新加載CMake項目,并注意運行/調試配置列表中的my_package:
運行ROS節點
1、在從CLion運行節點之前,在新終端中打開ROS主站:
roscore
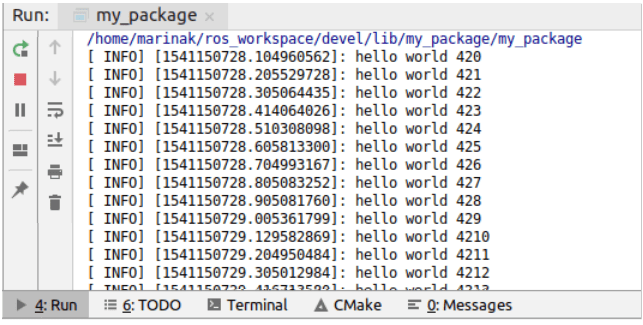
2、在CLion,運行 的my_package配置。運行工具窗口將顯示節點輸出:
的my_package配置。運行工具窗口將顯示節點輸出:
3、在單獨的終端中,檢查當前活動的ROS主題。如果我們打印消息chatter,輸出將類似于我們在CLion中看到的內容:
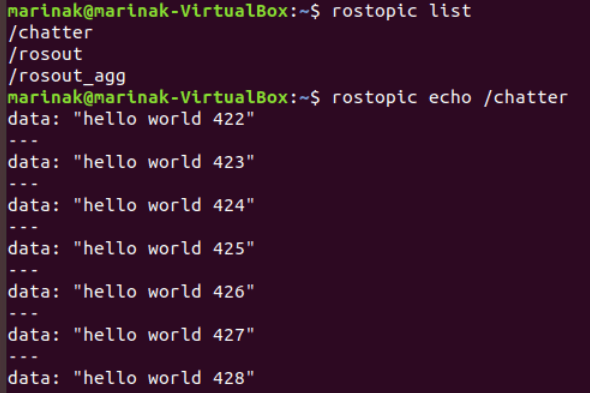
現在,如果我們 在CLion中停止應用程序,該rostopic echo /chatter命令將沒有輸出。
在CLion中停止應用程序,該rostopic echo /chatter命令將沒有輸出。
以上是Clion ROS開發環境的設置方法的所有內容,感謝各位的閱讀!希望分享的內容對大家有幫助,更多相關知識,歡迎關注億速云行業資訊頻道!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





