溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
TOF深度相機技術原理是什么,很多新手對此不是很清楚,為了幫助大家解決這個難題,下面小編將為大家詳細講解,有這方面需求的人可以來學習下,希望你能有所收獲。
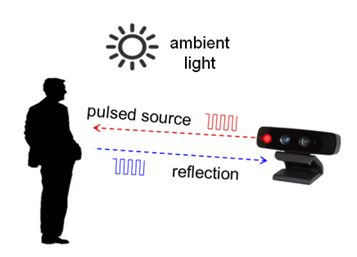
TOF, 即time of flight ,直譯過來就是飛行時間。故名思義,即,測量光在空間中飛行的時間,通過換算成距離,就可以測得深度相機與物體的距離。通常,TOF深度相機組成有一個發射模塊,一個接收模塊。發射模塊可以是LED、激光等發射元件,它將發射例如850nm的調制紅外光,物體經過反射后,由接收模塊接收到反射的紅外光。由于發射和接收的都是調制波,TOF深度相機可以計算發射和接收的相位差,通過換算得到深度值,即深度相機與物體的深度距離。
一個簡易的單點TOF系統組成如下圖:
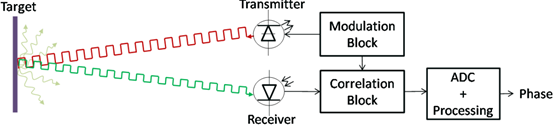
它由一個發射二極管、接收二極管、調制模塊,解調模塊、處理器幾部分組成。調制模塊負責調制發射的紅外調制波,通過發射二極管將信號發射出去;解調模塊負責對接受二極管接收到的反射紅外波解調;處理器中包含ADC和數據處理,ADC是為了將模擬信號轉化為數字信號,具體是什么模擬信號下文將會詳細講述;數據處理為了將測得的相位差換算成深度信息。
一個完整的TOF深度相機系統組成如下圖:
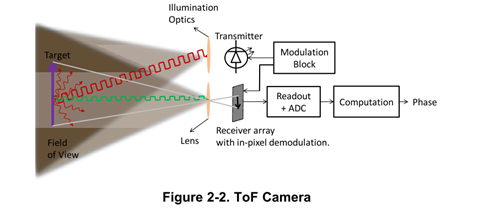
它和傳統RGB攝像頭的組成結構基本相似;
另外,它與點單的TOF系統比較區別在于,測量范圍不是一個點,它是一個面,因此,接收模塊變成了點陣的光敏傳感器,通常使用的是CMOS傳感器;在傳感器前面、和發射二極管前面多了光學鏡片,一個是為了紅外波的輻射范圍、一個是為了濾除850nm以外的光線,就是說,要保證進入傳感器的光線只是850nm的,這樣才能保證測量的準確度。
因為相位差即代表物體的與攝像頭的距離,即深度,由于每個點的相位差不同,所以才能組成有關物體整幅深度圖像。
TOF傳感器工作原理中主要有兩種,基于脈沖波(paulse base)的技術原理、基于連續調制波(CW)的技術原理。
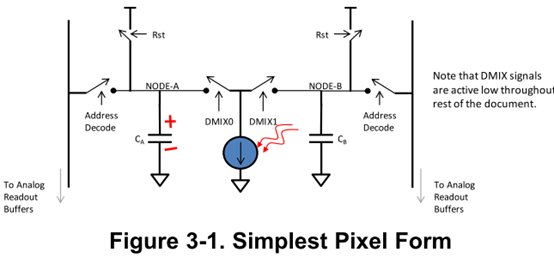
在這之前,需要知道解調模塊是如何工作的,如何讀取感光傳感器上面的電荷量。以單點像素的讀取測量為例:
整個讀取測量過程主要分為4個步驟:

分別是,Reset;Integration;Readout;Deadtime
Reset:在上圖中看到,Rst開關,在測量電荷量之前,需要將Rst開關閉合,讓電容CA與CB充電,充好點之后斷開。
Integration:Integration period ,DMIX0和DMIX1是由解調模塊控制的開關,什么時候開關,與調制和解調的頻率有關。當光子被感光元件(藍色圓圈箭頭)接收時,并且當DMIX0閉合時,這時候,充好電的電容CA就會和感光元件釋放出來的電子中和,電容CA放電,直到中和完畢,最后得到的電容電平代表著接受光子數量和時間的電平。
Readout:中和完畢之后,Address Decode 開關打開,讀取電容上的電平。
Deadtime:死區時間
從以上四個環節來看,Integration Time 是最重要的。
為什么還會有DMIX0和DMIX1?
發射模塊發射矩形脈沖波,物體發射后具有相位差的脈沖波,測量相位差的方法如下圖:
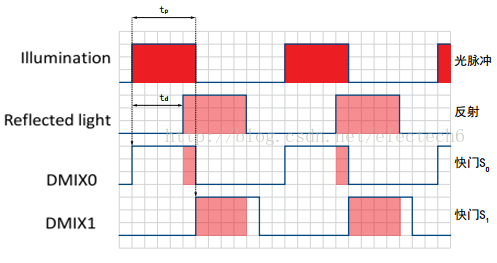
發射脈沖可以設定一個頻率f,并且開啟兩個反向的窗口,DMIX0與DMIX1用來接收光子的數量, 一個窗口的頻率和相位是與發射脈沖是一致的,另外一個是與DMIX1反向,并且相位差為180。
在兩個窗口打開的時候,也就是高電平的時候,并且這時候存在物體反射過來的脈沖波,這時候兩個不同窗口在各自的時間內收集電荷。在圖上已經用紅色上色表示。假設DMIX0收集到的電荷量為Q0,DMIX1收集到的電荷量為Q1。Q0與Q1相加的這部分就是有反射脈沖時間內收集的電荷量。
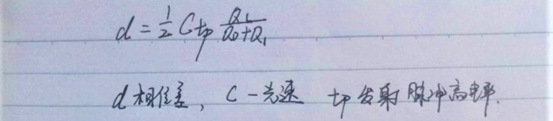
td表示相位差存在的時間,為了計算td,可以通過計算Q1在反射脈沖所占的時間,為了計算Q1這部分的時間,我們可以讀取DMIX0與DMIX1窗口上的電平,也就是Q0加Q1與Q1的比值,再乘上發射電平高電平的時間。因此,可以通過式子計算相位差d:
注:以上的整個過程稱為IntegrationTime
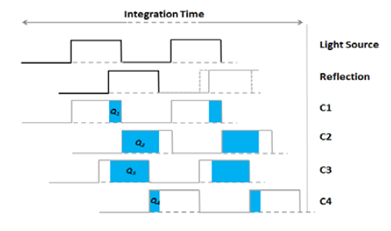
連續調制波在脈沖波的基礎上而來,連續調制波通常是連續正弦波調制,與脈沖不同的是,連續調制波開啟了4個窗口分別是C1-C4.如下圖所示:
由于連續調制波通常是連續正弦波調制,可以將調制波看成是正弦波如下圖所示:
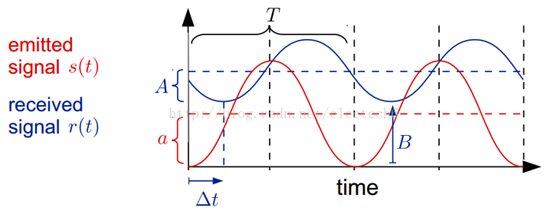
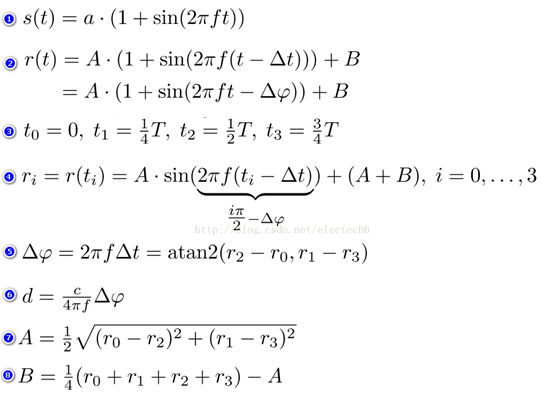
連續正弦波調制測量方法,推導過程如下。序號1-8對應下圖的公式1-8。
1. 假設發射的正弦信號s(t)振幅是a,調制頻率是f
2. 經過時延 △t后接收到的信號為接收r(t),衰減后的振幅為A,強度偏移(由環境光引起)為B
3. 四個采樣時間間隔相等,均為T/4
4. 根據上述采樣時間可以列出四個方程組
5. 從而可以計算出發射和接收的正弦信號的相位偏移△φ
6. 據此可以根據(6)中公式計算物體和深度相機的距離d
7. 接收信號的衰減后的振幅A的計算結果
8. 接收信號強度偏移B的計算結果,反映了環境光
更加詳細的推導過程如下:
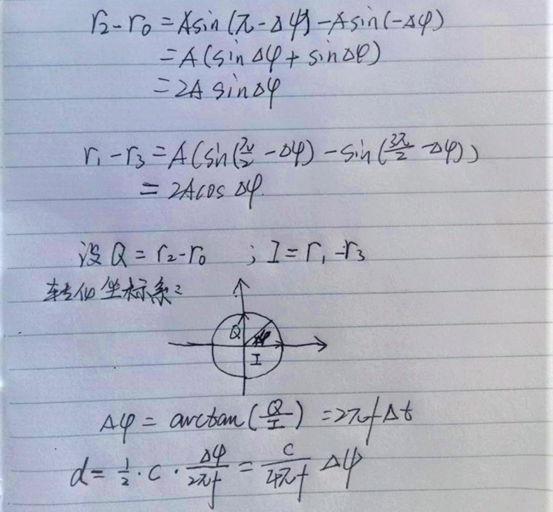
其實兩種基于不同原理的計算相位的方法差不多,連續調制波相對復雜。關于如何推到,更多的是數學的部分,最后計算d公式中,其實表示的含義是一樣的,只是符號不同罷了。
優點:
1. 因為不用計算振幅和環境光,測量方法簡單,響應較快,可以提高相機的幀率
2. 由于脈沖占空比在整個周期中比CW方法要窄很多,所以在理論上設計可以檢測更遠的距離
缺點:
1. 由于沒有抵消環境光對測量的影響,所以將會受到環境光的影響。但是可以通過開設一個接收環境光分量的窗口彌補。
2. 相對于CW的方案,測量精度較低,但也不會低到離譜
優點:
1. 相位偏移(公式5)中的(r2-r0)和(r1-r3)相對于脈沖調試法消除了由于測量器件或者環境光引起的固定偏差。連續調制波使用多個測量窗口,(Q 3 -Q 4 )及(Q 1 -Q 2 )可以減掉測量中的共同成分(復位電壓,環境光,電容增益等)及其中的偏差。
2. 可以根據接收信號的振幅A和強度偏移B來間接的估算深度測量結果的精確程度(方差)。
3. 不要求光源必須是短時高強度脈沖,可以采用不同類型的光源,運用不同的調制方法
缺點:
1.需要多次采樣,測量時間較長,限制了相機的幀率
2. 因為采集和計算量大,導致在相同成本的產品中,深度分辨率降低
看完上述內容是否對您有幫助呢?如果還想對相關知識有進一步的了解或閱讀更多相關文章,請關注億速云行業資訊頻道,感謝您對億速云的支持。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





