溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要為大家展示了“Matplotlib如何繪制動態實時曲線”,內容簡而易懂,條理清晰,希望能夠幫助大家解決疑惑,下面讓小編帶領大家一起研究并學習一下“Matplotlib如何繪制動態實時曲線”這篇文章吧。
很多時候,我們需要實時的繪制曲線,如實時的繪制串口接收到的數據。最先想到的解決策略是類似于Matlab種的drawnow函數。
在python中Matplotlib庫有著和Matlan繪圖庫相似的功能,但是并沒有drawnow這樣的函數。
通過網上現有的資料 基于Python實現matplotlib中動態更新圖片(交互式繪圖) ,可以通過打開Matplotlib的交互模式來實現實時繪圖的目的,此時需要用到函數matplotlib.pyplot.ion
通過上述方法實時繪圖,存在一個嚴重的問題:隨著時間推移,CPU消耗越大,費時越多,最終導致程序卡頓。這顯然無法滿足我們實時繪圖的要求。
以下通過time模塊計算每一步的耗時,直觀地表現這一現象。
def Method(point):
es_time = np.zeros([point])
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
ax.axis("equal") #設置圖像顯示的時候XY軸比例
ax.set_xlabel('Horizontal Position')
ax.set_ylabel('Vertical Position')
ax.set_title('Vessel trajectory')
plt.grid(True) #添加網格
plt.ion() #interactive mode on
IniObsX=0000
IniObsY=4000
IniObsAngle=135
IniObsSpeed=10*math.sqrt(2) #米/秒
print('開始仿真')
for t in range(point):
t0 = time.time()
#障礙物船只軌跡
obsX=IniObsX+IniObsSpeed*math.sin(IniObsAngle/180*math.pi)*t
obsY=IniObsY+IniObsSpeed*math.cos(IniObsAngle/180*math.pi)*t
ax.scatter(obsX,obsY,c='b',marker='.') #散點圖
#下面的圖,兩船的距離
plt.pause(0.001)
es_time[t] = 1000*(time.time() - t0)
return es_time耗時結果
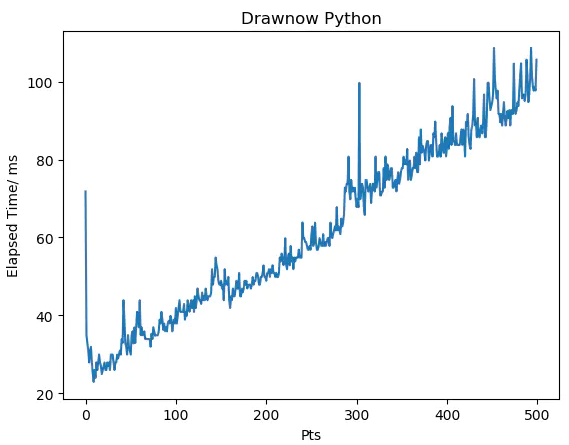
Method
很顯然每步繪圖時間與繪圖點數呈線性相關的趨勢,且隨著點數增加,時間消耗越多。可以想象,當繪圖的點數到達上萬乃至億的時候,那電腦就卡住了。
個人猜測出現上述這種現象的原因,是由代碼ax.scatter(obsX,obsY,c='b',marker='.')造成的。這段代碼每一循環一次就新畫一條曲線,而不清除之前的曲線,這就必然導致越往后循環所花費的CPU資源內存資源越多,最終機器卡死。
既然原因是因為不斷重復畫圖所致,導致機器資源的累積消耗,所以想到的第一個解決方法,那就是每次畫圖前,清除之前的曲線。
根據上述思想,在每一次的畫圖代碼ax.scatter(obsX,obsY,c='b',marker='.')前加上清除代碼plt.cla()。即:
plt.cla() ax.plot(obsX,obsY,'-g',marker='*') #散點圖
可是這樣做之后就會存在新的問題:之前定義的坐標軸,標題,圖例等等信息就都被清除了。解決方法則,需要在每一步的循環中,重新定義這些信息。
完整代碼
def Method_Improve(point):
def initial(ax):
ax.axis("equal") #設置圖像顯示的時候XY軸比例
ax.set_xlabel('Horizontal Position')
ax.set_ylabel('Vertical Position')
ax.set_title('Vessel trajectory')
plt.grid(True) #添加網格
return ax
es_time = np.zeros([point])
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
ax = initial(ax)
plt.ion() #interactive mode on
IniObsX=0000
IniObsY=4000
IniObsAngle=135
IniObsSpeed=10*math.sqrt(2) #米/秒
print('開始仿真')
obsX = [0,]
obsY = [4000,]
for t in range(point):
t0 = time.time()
#障礙物船只軌跡
obsX.append(IniObsX+IniObsSpeed*math.sin(IniObsAngle/180*math.pi)*t)
obsY.append(IniObsY+IniObsSpeed*math.cos(IniObsAngle/180*math.pi)*t)
plt.cla()
ax = initial(ax)
ax.plot(obsX,obsY,'-g',marker='*') #散點圖
#下面的圖,兩船的距離
plt.pause(0.001)
es_time[t] = 1000*(time.time() - t0)
return es_time耗時結果
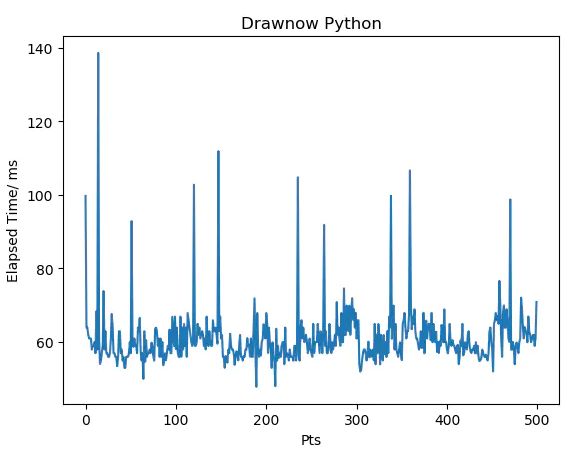
Method_Improve
顯然循環次數與耗時不再呈正相關趨勢,可以說是在一定誤差范圍內,耗時保持穩定。
改進方法中仍存在一個問題:由于每次循環都需要清除坐標軸信息,那么每次循環也必須再重新設置坐標軸信息。顯然這種做法,導致了額外的算力消耗,那能否有新的方法,規避這種問題呢?答案顯然是有的。
但是解決思路還是得從原始問題出發,即重復畫圖,導致資源的累積消耗。所以令一種新的思路:只畫一條(需要數量的)曲線,每次循環更改這些曲線的數據。
那么按照上述思路之后,只需程序開頭定義好坐標軸信息,而不需要每次循環內清除重設坐標軸信息。
具體做法,就是獲取曲線的句柄,進行修改,即有:
line.set_xdata(obsX) line.set_ydata(obsY)
完整代碼:
def ImprovedMethod_Improve(point):
es_time = np.zeros([point])
fig=plt.figure()
ax=fig.add_subplot(1,1,1)
ax.set_xlabel('Horizontal Position')
ax.set_ylabel('Vertical Position')
ax.set_title('Vessel trajectory')
line = ax.plot([0,0],[4000,4000],'-g',marker='*')[0]
plt.grid(True) #添加網格
plt.ion() #interactive mode on
IniObsX=0000
IniObsY=4000
IniObsAngle=135
IniObsSpeed=10*math.sqrt(2) #米/秒
print('開始仿真')
obsX = [0,]
obsY = [4000,]
for t in range(point):
t0 = time.time()
#障礙物船只軌跡
obsX.append(IniObsX+IniObsSpeed*math.sin(IniObsAngle/180*math.pi)*t)
obsY.append(IniObsY+IniObsSpeed*math.cos(IniObsAngle/180*math.pi)*t)
line.set_xdata(obsX)
line.set_ydata(obsY)
ax.set_xlim([-200,10*point+200])
ax.set_ylim([3800-10*point,4200])
#下面的圖,兩船的距離
plt.pause(0.001)
es_time[t] = 1000*(time.time() - t0)
return es_time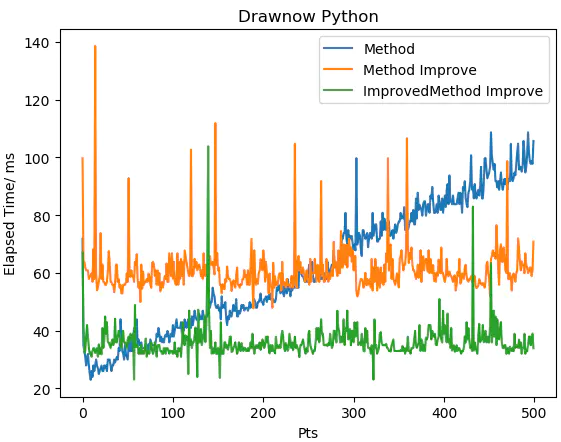
以上是“Matplotlib如何繪制動態實時曲線”這篇文章的所有內容,感謝各位的閱讀!相信大家都有了一定的了解,希望分享的內容對大家有所幫助,如果還想學習更多知識,歡迎關注億速云行業資訊頻道!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





