溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
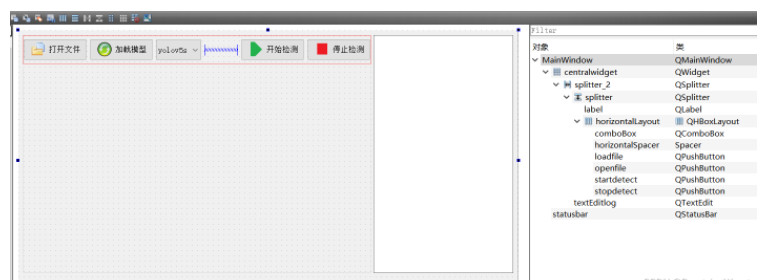
本篇內容主要講解“Qt結合OpenCV怎么部署yolov5”,感興趣的朋友不妨來看看。本文介紹的方法操作簡單快捷,實用性強。下面就讓小編來帶大家學習“Qt結合OpenCV怎么部署yolov5”吧!
mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include <QFileDialog>
#include <QFile>
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <QMainWindow>
#include <QTimer>
#include <QImage>
#include <QPixmap>
#include <QDateTime>
#include <QMutex>
#include <QMutexLocker>
#include <QMimeDatabase>
#include <iostream>
#include <yolov5.h>
#include <chrono>
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\opencv\\lib\\opencv_core453.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\opencv\\lib\\opencv_imgcodecs453.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\opencv\\lib\\opencv_imgproc453.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\opencv\\lib\\opencv_videoio453.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\opencv\\lib\\opencv_objdetect453.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\opencv\\lib\\opencv_dnn453.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\deployment_tools\\inference_engine\\lib\\intel64\\Release\\inference_engine.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\deployment_tools\\inference_engine\\lib\\intel64\\Release\\inference_engine_c_api.lib")
#pragma comment(lib,"C:\\Program Files (x86)\\Intel\\openvino_2021\\deployment_tools\\inference_engine\\lib\\intel64\\Release\\inference_engine_transformations.lib")
//LIBS+= -L "C:\Program Files (x86)\Intel\openvino_2021\opencv\lib\*.lib"
//LIBS+= -L "C:\Program Files (x86)\Intel\openvino_2021\deployment_tools\inference_engine\lib\intel64\Release\*.lib"
//#ifdef QT_NO_DEBUG
//#pragma comment(lib,"C:\Program Files (x86)\Intel\openvino_2021\opencv\lib\opencv_core452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_imgcodecs452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_imgproc452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_imgcodecs452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_video452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_videoio452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_objdetect452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_shape452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_dnn452.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_dnn_objdetect452.lib")
//#else
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_core452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_imgcodecs452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_imgproc452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_imgcodecs452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_video452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_videoio452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_objdetect452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_shape452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_dnn452d.lib")
//#pragma comment(lib,"E:/opencv_build/install/x64/vc16/lib/opencv_dnn_objdetect452d.lib")
//#endif
//#ifdef QT_NO_DEBUG
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_core452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_imgcodecs452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_imgproc452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_imgcodecs452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_video452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_videoio452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_objdetect452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_shape452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_dnn452.lib")
//#pragma comment(lib,"E:/opencv452_cuda/install/x64/vc16/lib/opencv_dnn_objdetect452.lib")
//#endif
QPixmap Mat2Image(cv::Mat src);
QT_BEGIN_NAMESPACE
namespace Ui { class MainWindow; }
QT_END_NAMESPACE
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
MainWindow(QWidget *parent = nullptr);
void Init();
~MainWindow();
private slots:
void readFrame(); //自定義信號處理函數
void on_openfile_clicked();
void on_loadfile_clicked();
void on_startdetect_clicked();
void on_stopdetect_clicked();
void on_comboBox_activated(const QString &arg1);
private:
Ui::MainWindow *ui;
QTimer *timer;
cv::VideoCapture *capture;
YOLOV5 *yolov5;
NetConfig conf;
NetConfig *yolo_nets;
std::vector<cv::Rect> bboxes;
int IsDetect_ok = 0;
};
#endif // MAINWINDOW_Hmainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
MainWindow::MainWindow(QWidget *parent)
: QMainWindow(parent)
, ui(new Ui::MainWindow)
{
ui->setupUi(this);
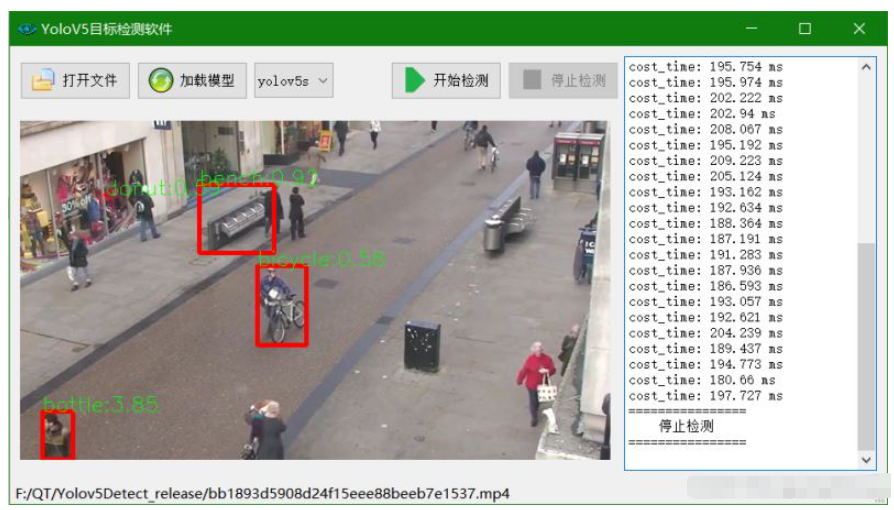
setWindowTitle(QStringLiteral("YoloV5目標檢測軟件"));
timer = new QTimer(this);
timer->setInterval(33);
connect(timer,SIGNAL(timeout()),this,SLOT(readFrame()));
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(false);
Init();
}
MainWindow::~MainWindow()
{
capture->release();
delete capture;
delete [] yolo_nets;
delete yolov5;
delete ui;
}
void MainWindow::Init()
{
capture = new cv::VideoCapture();
yolo_nets = new NetConfig[4]{
{0.5, 0.5, 0.5, "yolov5s"},
{0.6, 0.6, 0.6, "yolov5m"},
{0.65, 0.65, 0.65, "yolov5l"},
{0.75, 0.75, 0.75, "yolov5x"}
};
conf = yolo_nets[0];
yolov5 = new YOLOV5();
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral("默認模型類別:yolov5s args: %1 %2 %3")
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}
void MainWindow::readFrame()
{
cv::Mat frame;
capture->read(frame);
if (frame.empty()) return;
auto start = std::chrono::steady_clock::now();
yolov5->detect(frame);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
// double t0 = static_cast<double>(cv::getTickCount());
// yolov5->detect(frame);
// double t1 = static_cast<double>(cv::getTickCount());
// ui->textEditlog->append(QStringLiteral("cost_time: %1 ").arg((t1 - t0) / cv::getTickFrequency()));
cv::cvtColor(frame, frame, cv::COLOR_BGR2RGB);
QImage rawImage = QImage((uchar*)(frame.data),frame.cols,frame.rows,frame.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(rawImage));
}
void MainWindow::on_openfile_clicked()
{
QString filename = QFileDialog::getOpenFileName(this,QStringLiteral("打開文件"),".","*.mp4 *.avi;;*.png *.jpg *.jpeg *.bmp");
if(!QFile::exists(filename)){
return;
}
ui->statusbar->showMessage(filename);
QMimeDatabase db;
QMimeType mime = db.mimeTypeForFile(filename);
if (mime.name().startsWith("image/")) {
cv::Mat src = cv::imread(filename.toLatin1().data());
if(src.empty()){
ui->statusbar->showMessage("圖像不存在!");
return;
}
cv::Mat temp;
if(src.channels()==4)
cv::cvtColor(src,temp,cv::COLOR_BGRA2RGB);
else if (src.channels()==3)
cv::cvtColor(src,temp,cv::COLOR_BGR2RGB);
else
cv::cvtColor(src,temp,cv::COLOR_GRAY2RGB);
auto start = std::chrono::steady_clock::now();
yolov5->detect(temp);
auto end = std::chrono::steady_clock::now();
std::chrono::duration<double, std::milli> elapsed = end - start;
ui->textEditlog->append(QString("cost_time: %1 ms").arg(elapsed.count()));
QImage img = QImage((uchar*)(temp.data),temp.cols,temp.rows,temp.step,QImage::Format_RGB888);
ui->label->setPixmap(QPixmap::fromImage(img));
ui->label->resize(ui->label->pixmap()->size());
filename.clear();
}else if (mime.name().startsWith("video/")) {
capture->open(filename.toLatin1().data());
if (!capture->isOpened()){
ui->textEditlog->append("fail to open MP4!");
return;
}
IsDetect_ok +=1;
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
ui->textEditlog->append(QString::fromUtf8("Open video: %1 succesfully!").arg(filename));
//獲取整個幀數QStringLiteral
long totalFrame = capture->get(cv::CAP_PROP_FRAME_COUNT);
ui->textEditlog->append(QStringLiteral("整個視頻共 %1 幀").arg(totalFrame));
ui->label->resize(QSize(capture->get(cv::CAP_PROP_FRAME_WIDTH), capture->get(cv::CAP_PROP_FRAME_HEIGHT)));
//設置開始幀()
long frameToStart = 0;
capture->set(cv::CAP_PROP_POS_FRAMES, frameToStart);
ui->textEditlog->append(QStringLiteral("從第 %1 幀開始讀").arg(frameToStart));
//獲取幀率
double rate = capture->get(cv::CAP_PROP_FPS);
ui->textEditlog->append(QStringLiteral("幀率為: %1 ").arg(rate));
}
}
void MainWindow::on_loadfile_clicked()
{
QString onnxFile = QFileDialog::getOpenFileName(this,QStringLiteral("選擇模型"),".","*.onnx");
if(!QFile::exists(onnxFile)){
return;
}
ui->statusbar->showMessage(onnxFile);
if (!yolov5->loadModel(onnxFile.toLatin1().data())){
ui->textEditlog->append(QStringLiteral("加載模型失敗!"));
return;
}
IsDetect_ok +=1;
ui->textEditlog->append(QString::fromUtf8("Open onnxFile: %1 succesfully!").arg(onnxFile));
if (IsDetect_ok ==2)
ui->startdetect->setEnabled(true);
}
void MainWindow::on_startdetect_clicked()
{
timer->start();
ui->startdetect->setEnabled(false);
ui->stopdetect->setEnabled(true);
ui->openfile->setEnabled(false);
ui->loadfile->setEnabled(false);
ui->comboBox->setEnabled(false);
ui->textEditlog->append(QStringLiteral("================\n"
" 開始檢測\n"
"================\n"));
}
void MainWindow::on_stopdetect_clicked()
{
ui->startdetect->setEnabled(true);
ui->stopdetect->setEnabled(false);
ui->openfile->setEnabled(true);
ui->loadfile->setEnabled(true);
ui->comboBox->setEnabled(true);
timer->stop();
ui->textEditlog->append(QStringLiteral("================\n"
" 停止檢測\n"
"================\n"));
}
void MainWindow::on_comboBox_activated(const QString &arg1)
{
if (arg1.contains("s")){
conf = yolo_nets[0];
}else if (arg1.contains("m")) {
conf = yolo_nets[1];
}else if (arg1.contains("l")) {
conf = yolo_nets[2];
}else if (arg1.contains("x")) {
conf = yolo_nets[3];}
yolov5->Initialization(conf);
ui->textEditlog->append(QStringLiteral("使用模型類別:%1 args: %2 %3 %4")
.arg(arg1)
.arg(conf.nmsThreshold)
.arg(conf.objThreshold)
.arg(conf.confThreshold));
}yolov5類
yolov5.h
#ifndef YOLOV5_H
#define YOLOV5_H
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include <fstream>
#include <sstream>
#include <iostream>
#include <exception>
#include <QMessageBox>
struct NetConfig
{
float confThreshold; // class Confidence threshold
float nmsThreshold; // Non-maximum suppression threshold
float objThreshold; //Object Confidence threshold
std::string netname;
};
class YOLOV5
{
public:
YOLOV5(){}
void Initialization(NetConfig conf);
bool loadModel(const char* onnxfile);
void detect(cv::Mat& frame);
private:
const float anchors[3][6] = {{10.0, 13.0, 16.0, 30.0, 33.0, 23.0}, {30.0, 61.0, 62.0, 45.0, 59.0, 119.0},{116.0, 90.0, 156.0, 198.0, 373.0, 326.0}};
const float stride[3] = { 8.0, 16.0, 32.0 };
std::string classes[80] = {"person", "bicycle", "car", "motorbike", "aeroplane", "bus",
"train", "truck", "boat", "traffic light", "fire hydrant",
"stop sign", "parking meter", "bench", "bird", "cat", "dog",
"horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe",
"backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat",
"baseball glove", "skateboard", "surfboard", "tennis racket",
"bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl",
"banana", "apple", "sandwich", "orange", "broccoli", "carrot",
"hot dog", "pizza", "donut", "cake", "chair", "sofa", "pottedplant",
"bed", "diningtable", "toilet", "tvmonitor", "laptop", "mouse",
"remote", "keyboard", "cell phone", "microwave", "oven", "toaster",
"sink", "refrigerator", "book", "clock", "vase", "scissors",
"teddy bear", "hair drier", "toothbrush"};
const int inpWidth = 640;
const int inpHeight = 640;
float confThreshold;
float nmsThreshold;
float objThreshold;
cv::Mat blob;
std::vector<cv::Mat> outs;
std::vector<int> classIds;
std::vector<float> confidences;
std::vector<cv::Rect> boxes;
cv::dnn::Net net;
void drawPred(int classId, float conf, int left, int top, int right, int bottom, cv::Mat& frame);
void sigmoid(cv::Mat* out, int length);
};
static inline float sigmoid_x(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
#endif // YOLOV5_Hyolov5.cpp
#include "yolov5.h"
using namespace std;
using namespace cv;
void YOLOV5::Initialization(NetConfig conf)
{
this->confThreshold = conf.confThreshold;
this->nmsThreshold = conf.nmsThreshold;
this->objThreshold = conf.objThreshold;
classIds.reserve(20);
confidences.reserve(20);
boxes.reserve(20);
outs.reserve(3);
}
bool YOLOV5::loadModel(const char *onnxfile)
{
try {
this->net = cv::dnn::readNetFromONNX(onnxfile);
return true;
} catch (exception& e) {
QMessageBox::critical(NULL,"Error",QStringLiteral("模型加載出錯,請檢查重試!\n %1").arg(e.what()),QMessageBox::Yes,QMessageBox::Yes);
return false;
}
this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_INFERENCE_ENGINE);
this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// try {
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_CUDA);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CUDA);
// } catch (exception& e2) {
// this->net.setPreferableBackend(cv::dnn::DNN_BACKEND_DEFAULT);
// this->net.setPreferableTarget(cv::dnn::DNN_TARGET_CPU);
// QMessageBox::warning(NULL,"warning",QStringLiteral("正在使用CPU推理!\n %1").arg(e2.what()),QMessageBox::Yes,QMessageBox::Yes);
// return false;
// }
}
void YOLOV5::detect(cv::Mat &frame)
{
cv::dnn::blobFromImage(frame, blob, 1 / 255.0, Size(this->inpWidth, this->inpHeight), Scalar(0, 0, 0), true, false);
this->net.setInput(blob);
this->net.forward(outs, this->net.getUnconnectedOutLayersNames());
/generate proposals
classIds.clear();
confidences.clear();
boxes.clear();
float ratioh = (float)frame.rows / this->inpHeight, ratiow = (float)frame.cols / this->inpWidth;
int n = 0, q = 0, i = 0, j = 0, nout = 8 + 5, c = 0;
for (n = 0; n < 3; n++) ///尺度
{
int num_grid_x = (int)(this->inpWidth / this->stride[n]);
int num_grid_y = (int)(this->inpHeight / this->stride[n]);
int area = num_grid_x * num_grid_y;
this->sigmoid(&outs[n], 3 * nout * area);
for (q = 0; q < 3; q++) ///anchor數
{
const float anchor_w = this->anchors[n][q * 2];
const float anchor_h = this->anchors[n][q * 2 + 1];
float* pdata = (float*)outs[n].data + q * nout * area;
for (i = 0; i < num_grid_y; i++)
{
for (j = 0; j < num_grid_x; j++)
{
float box_score = pdata[4 * area + i * num_grid_x + j];
if (box_score > this->objThreshold)
{
float max_class_socre = 0, class_socre = 0;
int max_class_id = 0;
for (c = 0; c < 80; c++) get max socre
{
class_socre = pdata[(c + 5) * area + i * num_grid_x + j];
if (class_socre > max_class_socre)
{
max_class_socre = class_socre;
max_class_id = c;
}
}
if (max_class_socre > this->confThreshold)
{
float cx = (pdata[i * num_grid_x + j] * 2.f - 0.5f + j) * this->stride[n]; ///cx
float cy = (pdata[area + i * num_grid_x + j] * 2.f - 0.5f + i) * this->stride[n]; ///cy
float w = powf(pdata[2 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_w; ///w
float h = powf(pdata[3 * area + i * num_grid_x + j] * 2.f, 2.f) * anchor_h; ///h
int left = (cx - 0.5*w)*ratiow;
int top = (cy - 0.5*h)*ratioh; ///坐標還原到原圖上
classIds.push_back(max_class_id);
confidences.push_back(max_class_socre);
boxes.push_back(Rect(left, top, (int)(w*ratiow), (int)(h*ratioh)));
}
}
}
}
}
}
// Perform non maximum suppression to eliminate redundant overlapping boxes with
// lower confidences
vector<int> indices;
cv::dnn::NMSBoxes(boxes, confidences, this->confThreshold, this->nmsThreshold, indices);
for (size_t i = 0; i < indices.size(); ++i)
{
int idx = indices[i];
Rect box = boxes[idx];
this->drawPred(classIds[idx], confidences[idx], box.x, box.y,
box.x + box.width, box.y + box.height, frame);
}
}
void YOLOV5::drawPred(int classId, float conf, int left, int top, int right, int bottom, Mat &frame)
{
rectangle(frame, Point(left, top), Point(right, bottom), Scalar(0, 0, 255), 3);
string label = format("%.2f", conf);
label = this->classes[classId] + ":" + label;
int baseLine;
Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
top = max(top, labelSize.height);
putText(frame, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 0.75, Scalar(0, 255, 0), 1);
}
void YOLOV5::sigmoid(Mat *out, int length)
{
float* pdata = (float*)(out->data);
int i = 0;
for (i = 0; i < length; i++)
{
pdata[i] = 1.0 / (1 + expf(-pdata[i]));
}
}
到此,相信大家對“Qt結合OpenCV怎么部署yolov5”有了更深的了解,不妨來實際操作一番吧!這里是億速云網站,更多相關內容可以進入相關頻道進行查詢,關注我們,繼續學習!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





