溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇文章為大家展示了關于ROS2安裝與docker環境使用是怎樣的,內容簡明扼要并且容易理解,絕對能使你眼前一亮,通過這篇文章的詳細介紹希望你能有所收獲。
docker是一個容器,可以用他來裝載鏡像。我可以把我的基礎環境用docker封裝成鏡像,大家都可以用這個鏡像。
學習ROS的過程中發現安裝過程會遇到很多問題,相信很多同學都被安裝時的問題擋住,于是想到我可以做個ROS的鏡像給自己與大家使用。于是選擇了docker,然后發現直接有現成的鏡像————輕松入手。
改進過后還可以封裝成自己的鏡像。
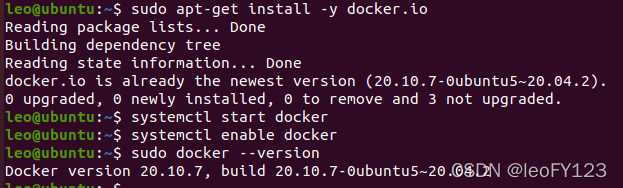
1 更新軟件列表
sudo apt-get update
2 安裝docker
sudo apt-get install -y docker.io
3 配置開機啟動
systemctl start docker systemctl enable docker
4 檢測安裝成功
sudo docker --version
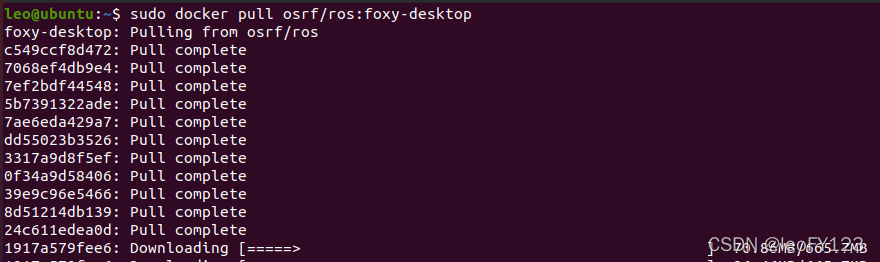
我這邊使用的的與foxy版本
1 下載鏡像文件,3個多G需要等待一會
sudo docker pull osrf/ros:foxy-desktop
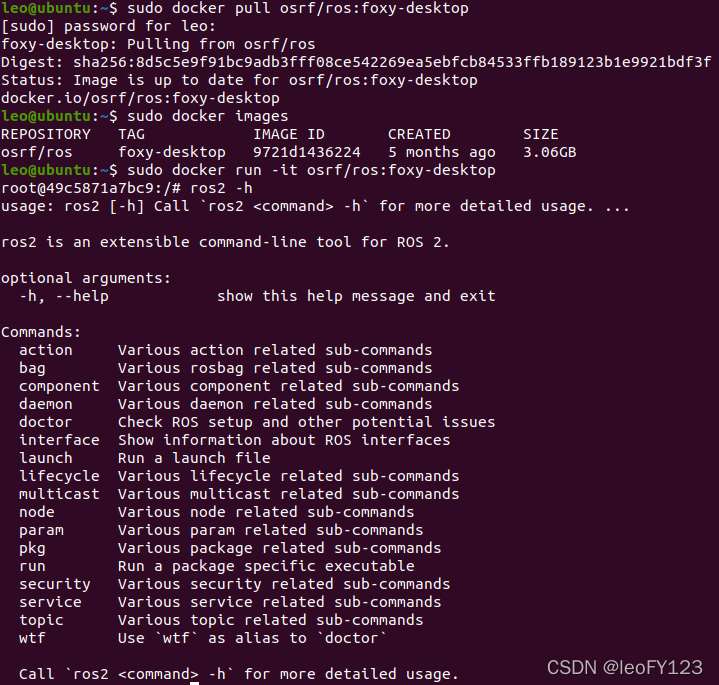
s2查看鏡像信息
sudo docker images
3 啟動鏡像
sudo docker run -it osrf/ros:foxy-desktop
4 enjoy for your Ros
這一步顯示ROS2的幫助信息,ROS2已經裝好了,是不是很快!!!
ros2 -h
ros2 run turtlesim turtlesim_node
新開一個終端,重新啟動鏡像進入docker環境
sudo docker run -it osrf/ros:foxy-desktop ros2 run turtlesim turtle_teleop_key
上述內容就是關于ROS2安裝與docker環境使用是怎樣的,你們學到知識或技能了嗎?如果還想學到更多技能或者豐富自己的知識儲備,歡迎關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





