溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章將為大家詳細講解有關docker安裝ros2的詳細步驟是什么,文章內容質量較高,因此小編分享給大家做個參考,希望大家閱讀完這篇文章后對相關知識有一定的了解。
說一說今天的正題docker和ros2 ,本篇文章要解決三個問題:
ubuntu上如何安裝dockerdocker如何安裝ros2如何可視化docker中的小烏龜
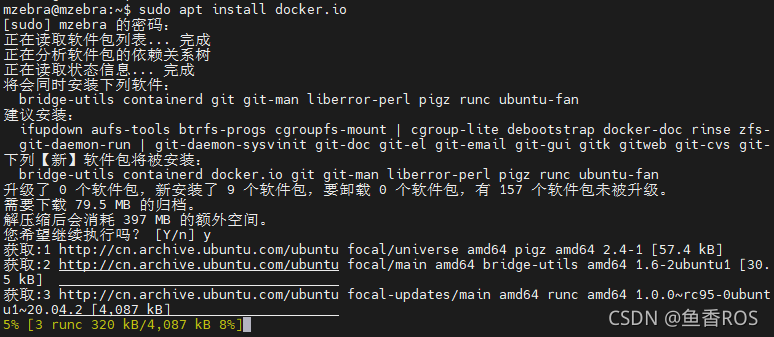
這個就很簡單啦,一句話搞定
sudo apt install docker.io
安裝其實談不上,這里我們直接拉取ROS2的官方鏡像
sudo docker pull osrf/ros:foxy-desktop
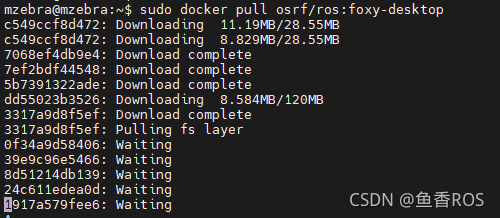
拉取完成使用下面的命令就可以進入已經安裝好的鏡像
sudo docker run -it osrf/ros:foxy-desktop
接著在終端里輸入ros2
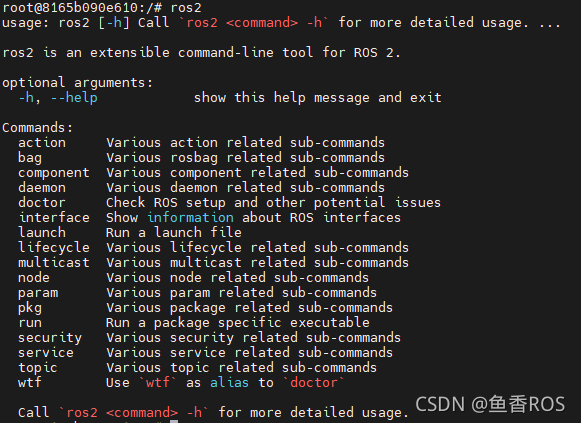
到這里就完成了docker中運行ros2鏡像,是不是速度賊快,而且完全和你的電腦隔離,一行指令就可以生成多個鏡像,連rosdep都是init和update好的。
安裝好啟動mobaxterm遠程工具
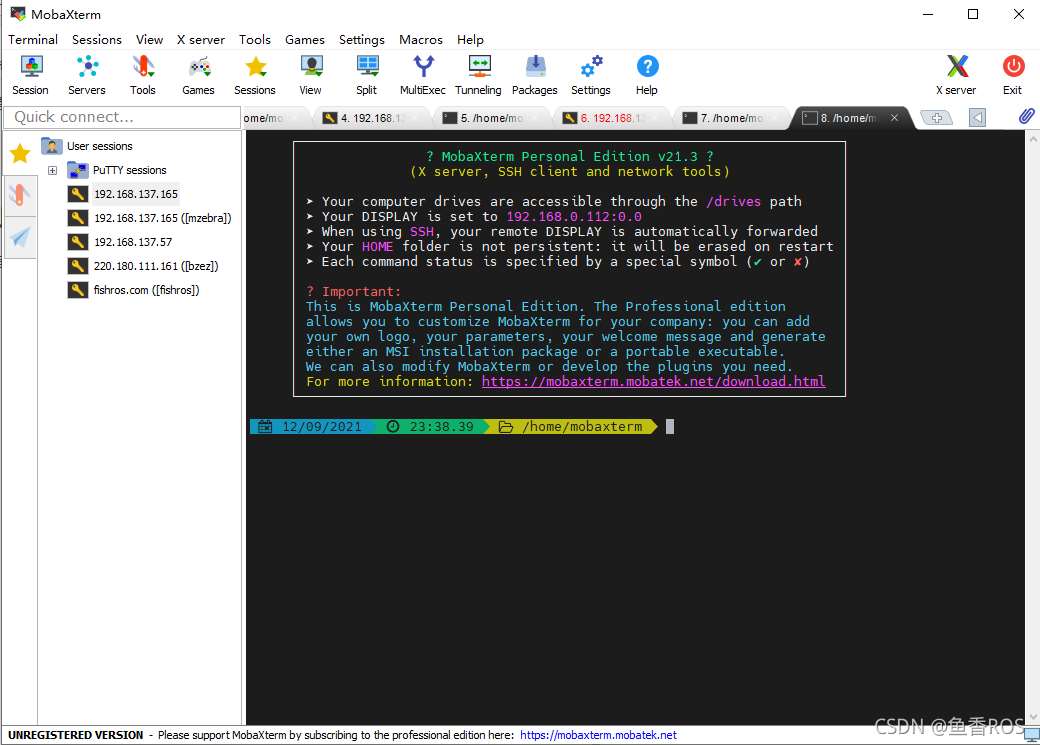
確保你和你的安裝docker的電腦在一個局域網里

注意這里的display,接著我們設置docker中ros2鏡像的DISPLAY的環境變量的值
export DISPLAY=192.168.0.112:0.0
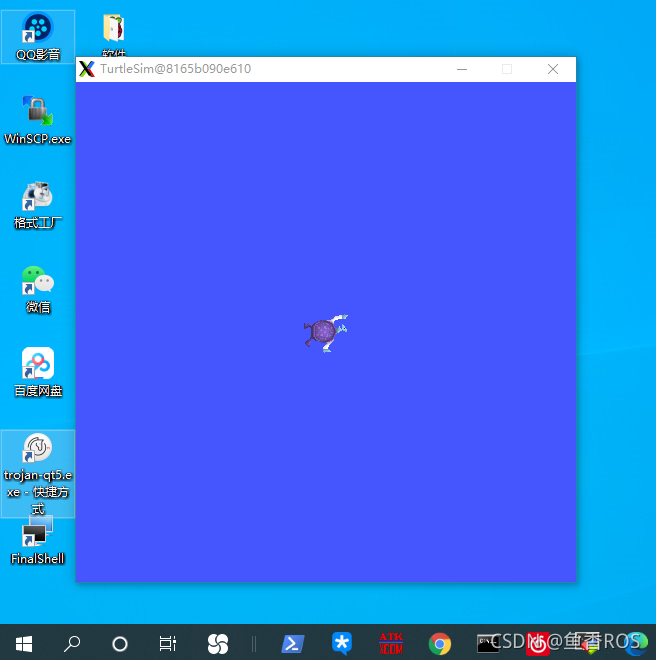
接著就可以啟動小烏龜模擬器看看
ros2 run turtlesim turtlesim_node
接著你會發現神奇的一幕,在你的windows電腦上跳出來了小烏龜的界面
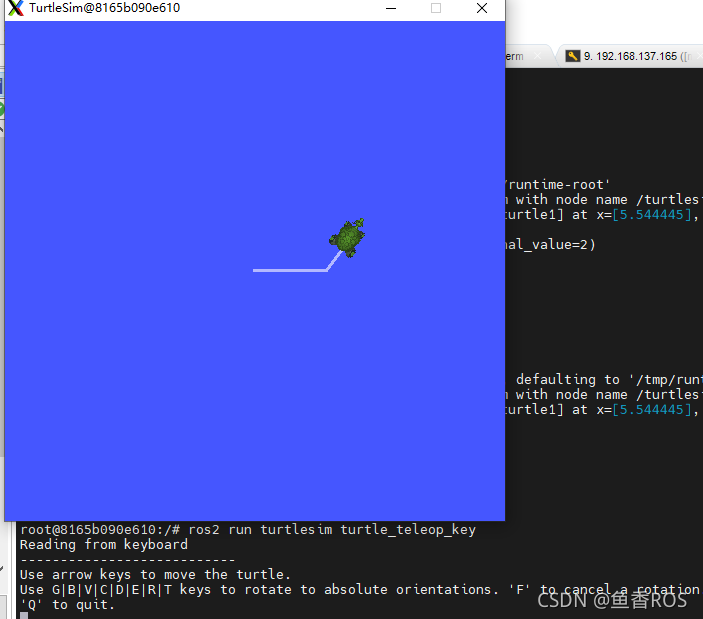
接著運行鍵盤控制節點
ros2 run turtlesim turtle_teleop_key
按下按鍵,小烏龜就跑起來了
關于docker安裝ros2的詳細步驟是什么就分享到這里了,希望以上內容可以對大家有一定的幫助,可以學到更多知識。如果覺得文章不錯,可以把它分享出去讓更多的人看到。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





