溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
今天小編給大家分享一下matlab怎么實現平面移動機器人仿真與控制的相關知識點,內容詳細,邏輯清晰,相信大部分人都還太了解這方面的知識,所以分享這篇文章給大家參考一下,希望大家閱讀完這篇文章后有所收獲,下面我們一起來了解一下吧。
目標:
實現小車速度、角速度與左右輪速度的轉化
實現小車位姿計算(通過已行進記錄累積)
實現小車距離傳感器讀數轉化
首先打開這個文件
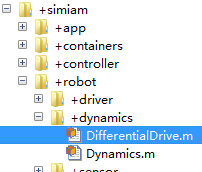
在提示完成的位置
實現小車速度、角速度與左右輪速度的轉化
%% START CODE BLOCK %%
vel_r = (2*v+w*L)/2/R;
vel_l = (2*v-w*L)/2/R;
%% END CODE BLOCK %%
然后打開
在
實現小車位姿計算(通過已行進記錄累積)
%% START CODE BLOCK %%
d_right = (right_ticks-prev_right_ticks)*m_per_tick;
d_left = (left_ticks-prev_left_ticks)*m_per_tick;
d_center = (d_right + d_left)/2;
phi = (d_right - d_left)/L;
x_dt = d_center*cos(theta);
y_dt = d_center*sin(theta);
theta_dt = phi;
%% END CODE BLOCK %%
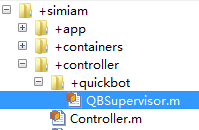
最后打開
在
實現小車距離傳感器讀數轉化
%% START CODE BLOCK %%
ir_voltages = ir_array_values*3/1000;
coeff = [-0.0182 0.1690 -0.6264 1.1853 -1.2104 0.6293];
%% END CODE BLOCK %%
就完成了這周的目標了,在
修改小車的移動參數
就可以實現小車按照預定參數運行了
以上就是“matlab怎么實現平面移動機器人仿真與控制”這篇文章的所有內容,感謝各位的閱讀!相信大家閱讀完這篇文章都有很大的收獲,小編每天都會為大家更新不同的知識,如果還想學習更多的知識,請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





