溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
如何在Python中利用Opencv對邊緣進行檢測?針對這個問題,這篇文章詳細介紹了相對應的分析和解答,希望可以幫助更多想解決這個問題的小伙伴找到更簡單易行的方法。
Canny邊緣檢測器是一種被廣泛使用的算法,并被認為是邊緣檢測最優的算法,該方法使用了比高斯差分算法更復雜的技巧,如多向灰度梯度和滯后閾值化。
Canny邊緣檢測器算法基本步驟:
平滑圖像:通過使用合適的模糊半徑執行高斯模糊來減少圖像內的噪聲。
計算圖像的梯度:這里計算圖像的梯度,并將梯度分類為垂直、水平和斜對角。這一步的輸出用于在下一步中計算真正的邊緣。
非最大值抑制:利用上一步計算出來的梯度方向,檢測某一像素在梯度的正方向和負方向上是否是局部最大值,如果是,則抑制該像素(像素不屬于邊緣)。這是一種邊緣細化技術,用最急劇的變換選出邊緣點。
用滯后閾值化選擇邊緣:最后一步,檢查某一條邊緣是否明顯到足以作為最終輸出,最后去除所有不明顯的邊緣。
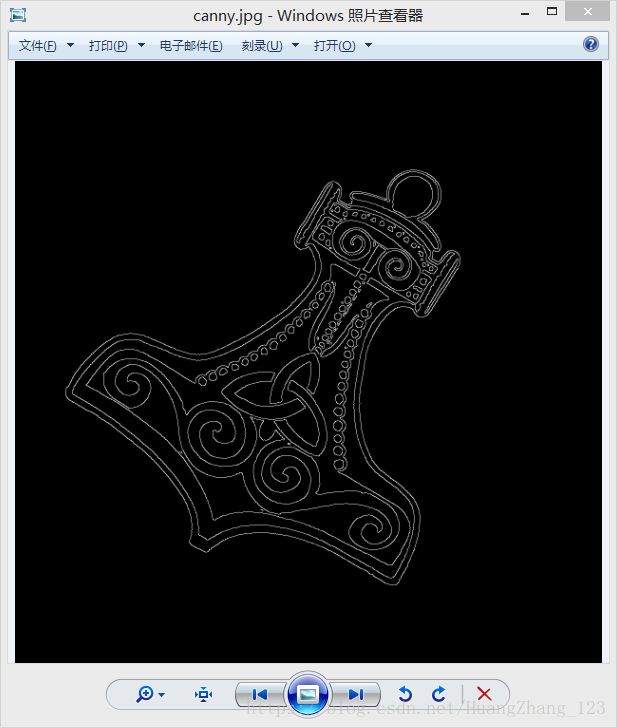
Opencv使用Canny邊緣檢測相對簡單,代碼如下:
import cv2
import numpy as np
img = cv2.imread("hammer.jpg", 0)
cv2.imwrite("canny.jpg", cv2.Canny(img, 200, 300))
cv2.imshow("canny", cv2.imread("canny.jpg"))
cv2.waitKey()
cv2.destroyAllWindows()運行結果:
Canny函數的原型為
cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
必要參數:
第一個參數是需要處理的原圖像,該圖像必須為單通道的灰度圖;
第二個參數是滯后閾值1;
第三個參數是滯后閾值2。
輪廓檢測主要由cv2.findContours函數實現的。
函數的原型為
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
函數參數
第一個參數是尋找輪廓的圖像;
第二個參數表示輪廓的檢索模式,有四種(本文介紹的都是新的cv2接口):
cv2.RETR_EXTERNAL表示只檢測外輪廓 。
cv2.RETR_LIST檢測的輪廓不建立等級關系。
cv2.RETR_CCOMP建立兩個等級的輪廓,上面的一層為外邊界,里面的一層為內孔的邊界信息。如果內孔內還有一個連通物體,這個物體的邊界也在頂層。
cv2.RETR_TREE建立一個等級樹結構的輪廓。
第三個參數method為輪廓的逼近方法
cv2.CHAIN_APPROX_NONE存儲所有的輪廓點,相鄰的兩個點的像素位置差不超過1,即max(abs(x1-x2),abs(y2-y1))==1。
cv2.CHAIN_APPROX_SIMPLE壓縮水平方向,垂直方向,對角線方向的元素,只保留該方向的終點坐標,例如一個矩形輪廓只需4個點來保存輪廓信息。
cv2.CHAIN_APPROX_TC89_L1和cv2.CHAIN_APPROX_TC89_KCOS都是使用teh-Chinl chain近似算法。
返回值
如:image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
image:是原圖像
contours:圖像的輪廓,以列表的形式表示,每個元素都是圖像中的一個輪廓。
hier:相應輪廓之間的關系。這是一個ndarray,其中的元素個數和輪廓個數相同,每個輪廓contours[i]對應4個hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分別表示后一個輪廓、前一個輪廓、父輪廓、內嵌輪廓的索引編號,如果沒有對應項,則該值為負數。
原圖:

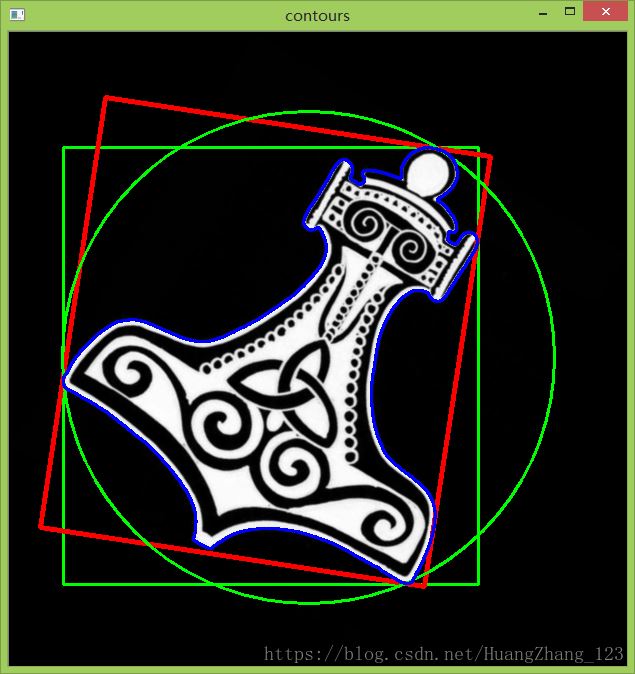
示例一
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg", cv2.IMREAD_UNCHANGED))
# threshold 函數對圖像進行二化值處理,由于處理后圖像對原圖像有所變化,因此img.copy()生成新的圖像,cv2.THRESH_BINARY是二化值
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY), 127, 255, cv2.THRESH_BINARY)
# findContours函數查找圖像里的圖形輪廓
# 函數參數thresh是圖像對象
# 層次類型,參數cv2.RETR_EXTERNAL是獲取最外層輪廓,cv2.RETR_TREE是獲取輪廓的整體結構
# 輪廓逼近方法
# 輸出的返回值,image是原圖像、contours是圖像的輪廓、hier是層次類型
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
# 輪廓繪制方法一
# boundingRect函數計算邊框值,x,y是坐標值,w,h是矩形的寬和高
x, y, w, h = cv2.boundingRect(c)
# 在img圖像畫出矩形,(x, y), (x + w, y + h)是矩形坐標,(0, 255, 0)設置通道顏色,2是設置線條粗度
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 輪廓繪制方法二
# 查找最小區域
rect = cv2.minAreaRect(c)
# 計算最小面積矩形的坐標
box = cv2.boxPoints(rect)
# 將坐標規范化為整數
box = np.int0(box)
# 繪制矩形
cv2.drawContours(img, [box], 0, (0, 0, 255), 3)
# 輪廓繪制方法三
# 圓心坐標和半徑的計算
(x, y), radius = cv2.minEnclosingCircle(c)
# 規范化為整數
center = (int(x), int(y))
radius = int(radius)
# 勾畫圓形區域
img = cv2.circle(img, center, radius, (0, 255, 0), 2)
# # 輪廓繪制方法四
# 圍繞圖形勾畫藍色線條
cv2.drawContours(img, contours, -1, (255, 0, 0), 2)
# 顯示圖像
cv2.imshow("contours", img)
cv2.waitKey()
cv2.destroyAllWindows()運行結果如圖所示:
示例二
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg", cv2.IMREAD_UNCHANGED))
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY) , 127, 255, cv2.THRESH_BINARY)
# findContours函數查找圖像里的圖形輪廓
# 函數參數thresh是圖像對象
# 層次類型,參數cv2.RETR_EXTERNAL是獲取最外層輪廓,cv2.RETR_TREE是獲取輪廓的整體結構
# 輪廓逼近方法
# 輸出的返回值,image是原圖像、contours是圖像的輪廓、hier是層次類型
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 創建新的圖像black
black = cv2.cvtColor(np.zeros((img.shape[1], img.shape[0]), dtype=np.uint8), cv2.COLOR_GRAY2BGR)
for cnt in contours:
# 輪廓周長也被稱為弧長。可以使用函數 cv2.arcLength() 計算得到。這個函數的第二參數可以用來指定對象的形狀是閉合的(True) ,還是打開的(一條曲線)
epsilon = 0.01 * cv2.arcLength(cnt, True)
# 函數approxPolyDP來對指定的點集進行逼近,cnt是圖像輪廓,epsilon表示的是精度,越小精度越高,因為表示的意思是是原始曲線與近似曲線之間的最大距離。
# 第三個函數參數若為true,則說明近似曲線是閉合的,它的首位都是相連,反之,若為false,則斷開。
approx = cv2.approxPolyDP(cnt, epsilon, True)
# convexHull檢查一個曲線的凸性缺陷并進行修正,參數cnt是圖像輪廓。
hull = cv2.convexHull(cnt)
# 勾畫圖像原始的輪廓
cv2.drawContours(black, [cnt], -1, (0, 255, 0), 2)
# 用多邊形勾畫輪廓區域
cv2.drawContours(black, [approx], -1, (255, 255, 0), 2)
# 修正凸性缺陷的輪廓區域
cv2.drawContours(black, [hull], -1, (0, 0, 255), 2)
# 顯示圖像
cv2.imshow("hull", black)
cv2.waitKey()
cv2.destroyAllWindows()關于如何在Python中利用Opencv對邊緣進行檢測問題的解答就分享到這里了,希望以上內容可以對大家有一定的幫助,如果你還有很多疑惑沒有解開,可以關注億速云行業資訊頻道了解更多相關知識。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





