溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
手把手教你實現貪吃蛇AI,具體內容如下
1. 目標
這一部分主要是講解編寫貪吃蛇AI所需要用到的算法基礎。
2. 問題分析
貪吃蛇AI說白了就是尋找一條從蛇頭到食物的一條最短路徑,同時這條路徑需要避開障礙物,這里僅有的障礙就是蛇身。而A star 算法就是專門針對這一個問題的。在A star 算法中需要用到排序算法,這里采用堆排序(當然其他排序也可以),如果對堆排序不熟悉的朋友,請移步到這里——堆排序,先看看堆排序的內容。
3. A*算法
A star(也稱A*)搜尋算法俗稱A星算法。這是一種在圖形平面上,有多個節點的路徑,求出最低通過成本的算法。常用于游戲中對象的移動計算上。A* 算法是一種啟發式搜尋算法,有別于DFS, BFS搜索。可以這樣理解“啟發式”的涵義,比如從起點A到達目的地B的路線,并不是直接告訴你,從A出發,向東行駛200米,右轉進入XX路,直行500米到達B;而是從A出發,直行,直到遇到第一家肯德基,右轉直到看到B大廈。而A*算法中用來啟發的線索就是移動成本,也就是權重。
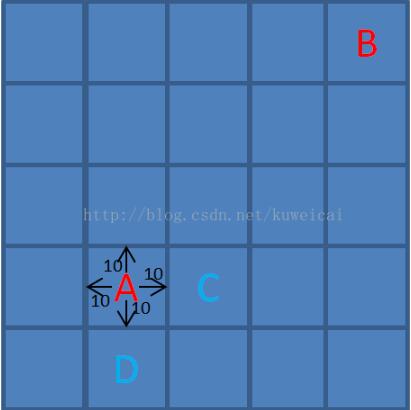
3.1 移動成本
如下圖所示,從A點出發,可以有四個方向可走(由于貪吃蛇僅僅可以走上下左右四個方向,所以這里不考慮走斜線的情況),假設每個方向移動一格的成本為10,A*算法中采用的F值來評價移動成本,F=G+H。假設節點C是待考察的一個點,G代表的是從起點A到C的移動成本,如下圖的情況G=10。那么H代表的就是從C點到目標B點的移動代價的預估值,如下圖的情況H=50,那么F=60。為什么說是預估,因為現在對于從C點到B點的情況還不清楚,因為中間可能存在障礙物,那么實際的移動代價就會大于預估的情況。而對于待考察點D,其F=80,顯然在C 和D點中(當然這里待考察的點不止C和D點),A*算法會選擇C點。
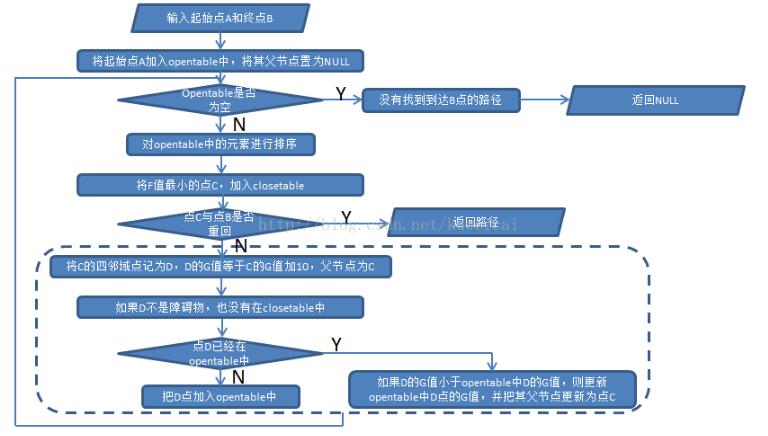
3.2 算法流程圖
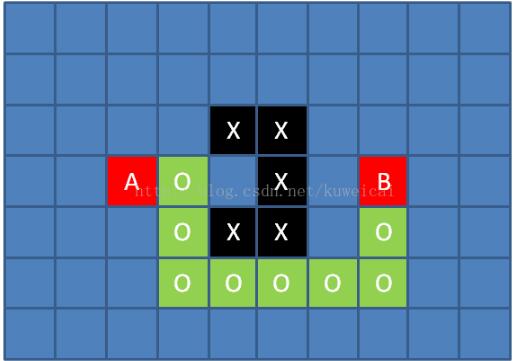
4. 源代碼
代碼中假定起始點A(5,10),食物B(5,15),如下圖。其中‘X'代表障礙物,‘O'代表的就是尋找到的從A到B的路徑。
#include<stdio.h>
#include<stdlib.h>
#define N 32
#define W 10
typedef struct STARNODE{
int x;//節點的x,y坐標
int y;
int G;//該節點的G, H值
int H;
int is_snakebody;//是否為蛇身,是為1,否則為0;
int in_open_table;//是否在open_table中,是為1,否則為0;
int in_close_table;//是否在close_table中,是為1,否則為0;
struct STARNODE* ParentNode;//該節點的父節點
} starnode, *pstarnode;
starnode mapnode[N/2+2][N+4];
pstarnode opentable[N*N/2];
pstarnode closetable[N*N/2];
int opennode_count=0;
int closenode_count=0;
starnode food;
//根據指針所指向的節點的F值,按大頂堆進行調整
void heapadjust(pstarnode a[], int m, int n)
{
int i;
pstarnode temp=a[m];
for(i=2*m;i<=n;i*=2)
{
if(i+1<=n && (a[i+1]->G+a[i+1]->H)>(a[i]->G+a[i]->H) )
{
i++;
}
if((temp->G+temp->H)>(a[i]->G+a[i]->H))
{
break;
}
a[m]=a[i];
m=i;
}
a[m]=temp;
}
void swap(pstarnode a[],int m, int n)
{
pstarnode temp;
temp=a[m];
a[m]=a[n];
a[n]=temp;
}
void crtheap(pstarnode a[], int n)
{
int i;
for(i=n/2;i>0;i--)
{
heapadjust(a, i, n);
}
}
void heapsort(pstarnode a[], int n)
{
int i;
crtheap(a,n);
for(i=n;i>1;i--)
{
swap(a,1,i);
heapadjust(a, 1,i-1);
}
}
//x1, y1是鄰域點坐標
//curtnode是當前點坐標
void insert_opentable(int x1, int y1, pstarnode pcurtnode)
{
int i;
if(!mapnode[x1][y1].is_snakebody && !mapnode[x1][y1].in_close_table)//如果不是蛇身也不在closetable中
{
if(mapnode[x1][y1].in_open_table && mapnode[x1][y1].G>pcurtnode->G+W)//如果已經在opentable中,但是不是最優路徑
{
mapnode[x1][y1].G=pcurtnode->G+W;//把G值更新
mapnode[x1][y1].ParentNode=pcurtnode;//把該鄰點的雙親節點更新
//由于改變了opentable中一個點的F值,需要對opentable中的點的順序進行調整,以滿足有序
for(i=1;i<=opennode_count;i++)
{
if(opentable[i]->x==x1 && opentable[i]->y==y1)
{
break;
}
heapsort(opentable, i);
}
}
else//把該點加入opentable中
{
opentable[++opennode_count]=&mapnode[x1][y1];
mapnode[x1][y1].G=pcurtnode->G+W;
mapnode[x1][y1].H=(abs(food.x-x1)+abs(food.y-y1))*W;
mapnode[x1][y1].in_open_table=1;
mapnode[x1][y1].ParentNode=pcurtnode;
heapsort(opentable, opennode_count);
}
}
}
//尋找當前點的四鄰域點,把符合條件的點加入opentable中
void find_neighbor(pstarnode pcurtnode)
{
int x=pcurtnode->x;
int y=pcurtnode->y;
if(x+1<=N/2)
{
insert_opentable(x+1, y, pcurtnode);
}
if(x-1>=1)
{
insert_opentable(x-1, y, pcurtnode);
}
if(y+1<=N+1)
{
insert_opentable(x,y+1, pcurtnode);
}
if(y-1>=2)
{
insert_opentable(x,y-1, pcurtnode);
}
}
int search_road(pstarnode startnode, pstarnode endnode)
{
int is_search_road=0;
opennode_count=0;
closenode_count=0;
pstarnode pcurtnode;
opentable[++opennode_count]=startnode;//起始點加入opentable中
startnode->in_open_table=1;
startnode->ParentNode=NULL;
startnode->G=0;
startnode->H=(abs(endnode->x-startnode->x)+abs(endnode->y-startnode->y))*W;
if(startnode->x==endnode->x && startnode->y==endnode->y)//如果起點和終點重合
{
is_search_road=1;
return is_search_road;
}
while(1)
{
//取出opentable中第1個節點加入closetable中
pcurtnode=opentable[1];
opentable[1]=opentable[opennode_count--];
closetable[++closenode_count]=pcurtnode;
pcurtnode->in_open_table=0;
pcurtnode->in_close_table=1;
if(pcurtnode->x==endnode->x && pcurtnode->y==endnode->y)
{
is_search_road=1;
break;
}
find_neighbor(pcurtnode);
if(!opennode_count)//如果opentable已經為空,即沒有找到路徑
{
break;
}
}
return is_search_road;
}
int main(void)
{
int i, j;
pstarnode startnode;
for(i=0;i<N/2+2;i++)
for(j=0;j<N+4;j++)
{
mapnode[i][j].G=0;
mapnode[i][j].H=0;
mapnode[i][j].in_close_table=0;
mapnode[i][j].in_open_table=0;
mapnode[i][j].is_snakebody=0;
mapnode[i][j].ParentNode=NULL;
mapnode[i][j].x=i;
mapnode[i][j].y=j;
}
startnode=&mapnode[5][10];
food.x=5;
food.y=15;
mapnode[5][13].is_snakebody=1;
mapnode[6][13].is_snakebody=1;
mapnode[4][13].is_snakebody=1;
mapnode[4][12].is_snakebody=1;
mapnode[6][12].is_snakebody=1;
int flag;
flag=search_road(startnode, &food);
pstarnode temp=&mapnode[5][15];
do{
printf("%d %d\n",temp->x, temp->y);
temp=temp->ParentNode;
}while(temp);
return 0;
}
以上就是本文的全部內容,希望對大家的學習有所幫助,也希望大家多多支持億速云。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





