溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇內容主要講解“FreeRTOS實時操作系統多任務管理基礎知識有哪些”,感興趣的朋友不妨來看看。本文介紹的方法操作簡單快捷,實用性強。下面就讓小編來帶大家學習“FreeRTOS實時操作系統多任務管理基礎知識有哪些”吧!
RTOS 系統的核心就是任務管理,FreeRTOS 也不例外,而且大多數學習 RTOS 系統的工程師或者學生主要就是為了使用 RTOS 的多任務處理功能,初步上手 RTOS 系統首先必須掌握的也是任務的創建、刪除、掛起和恢復等操作,由此可見任務管理的重要性。
回想一下我們以前在使用 51、AVR、STM32 單片機裸機(未使用系統)的時候一般都是在main 函數里面用 while(1)做一個大循環來完成所有的處理,即應用程序是一個無限的循環,循環中調用相應的函數完成所需的處理。有時候我們也需要中斷中完成一些處理。相對于多任務系統而言,這個就是單任務系統,也稱作前后臺系統,中斷服務函數作為前臺程序,大循環while(1)作為后臺程序
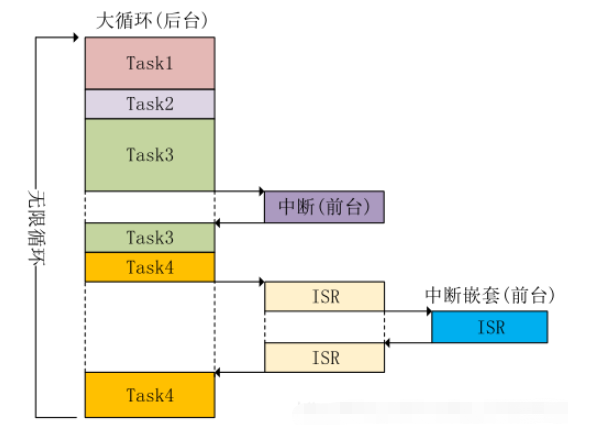
前后臺系統的實時性差,前后臺系統各個任務(應用程序)都是排隊等著輪流執行,不管你這個程序現在有多緊急,沒輪到你就只能等著!相當于所有任務(應用程序)的優先級都是一樣的。但是前后臺系統簡單啊,資源消耗也少啊!在稍微大一點的嵌入式應用中前后臺系統就明顯力不從心了,此時就需要多任務系統出馬了。
多任務系統會把一個大問題(應用)“分而治之”,把大問題劃分成很多個小問題,逐步的把小問題解決掉,大問題也就隨之解決了,這些小問題可以單獨的作為一個小任務來處理。這些小任務是并發處理的,注意,并不是說同一時刻一起執行很多個任務,而是由于每個任務執行的時間很短,導致看起來像是同一時刻執行了很多個任務一樣。多個任務帶來了一個新的問題,究竟哪個任務先運行,哪個任務后運行呢?完成這個功能的東西在 RTOS 系統中叫做任務調度器。不同的系統其任務調度器的實現方法也不同,比如 FreeRTOS 是一個搶占式的實時多任務系統,那么其任務調度器也是搶占式的。
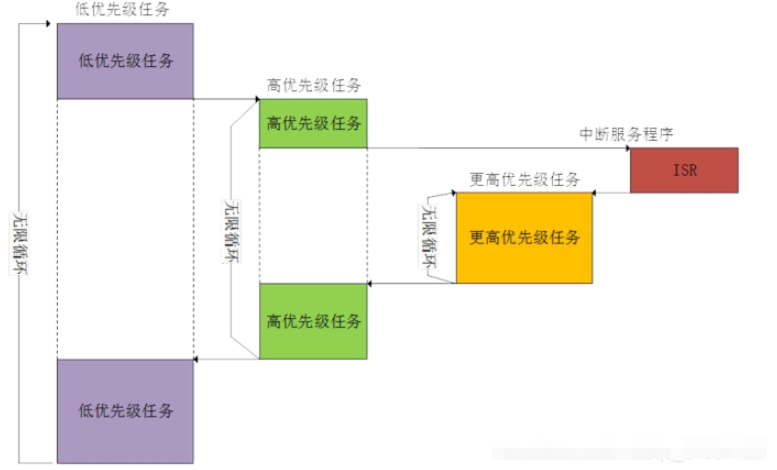
高優先級的任務可以打斷低優先級任務的運行而取得 CPU 的使用權,這樣就保證了那些緊急任務的運行。這樣我們就可以為那些對實時性要求高的任務設置一個很高的優先級,比如自動駕駛中的障礙物檢測任務等。高優先級的任務執行完成以后重新把 CPU 的使用權歸還給低優先級的任務,這個就是搶占式多任務系統的基本原理。
FreeRTOS 中應用既可以使用任務,也可以使用協程(Co-Routine),或者兩者混合使用。但是任務和協程使用不同的API函數,因此不能通過隊列(或信號量)將數據從任務發送給協程,反之亦然。協程是為那些資源很少的 MCU 準備的,其開銷很小,但是 FreeRTOS 官方已經不打算再更新協程了,所以本教程只講解任務。
在使用 RTOS 的時候一個實時應用可以作為一個獨立的任務。每個任務都有自己的運行環境,不依賴于系統中其他的任務或者 RTOS 調度器。任何一個時間點只能有一個任務運行,具體運行哪個任務是由 RTOS 調度器來決定的,RTOS 調度器因此就會重復的開啟、關閉每個任務。任務不需要了解 RTOS 調度器的具體行為,RTOS 調度器的職責是確保當一個任務開始執行的時候其上下文環境(寄存器值,堆棧內容等)和任務上一次退出的時候相同。為了做到這一點,每個任務都必須有個堆棧,當任務切換的時候將上下文環境保存在堆棧中,這樣當任務再次執行的時候就可以從堆棧中取出上下文環境,任務恢復運行。
任務特性: 簡單。沒有使用限制。支持搶占支持優先級每個任務都擁有堆棧導致了 RAM 使用量增大。如果使用搶占的話的必須仔細的考慮重入的問題。
協程是為那些資源很少的 MCU 而做的,但是隨著 MCU 的飛速發展,性能越來越強大,現
在協程幾乎很少用到了!但是 FreeRTOS 目前還沒有把協程移除的計劃,但是 FreeRTOS 是絕對
不會再更新和維護協程了,因此協程大家了解一下就行了。在概念上協程和任務是相似的,但
是有如下根本上的不同:
堆棧使用:所有的協程使用同一個堆棧(如果是任務的話每個任務都有自己的堆棧),這樣就比使用任務消耗更少的 RAM。
調度器和優先級:協程使用合作式的調度器,但是可以在使用搶占式的調度器中使用協程。
宏實現:協程是通過宏定義來實現的。
使用限制:為了降低對 RAM 的消耗做了很多的限制。
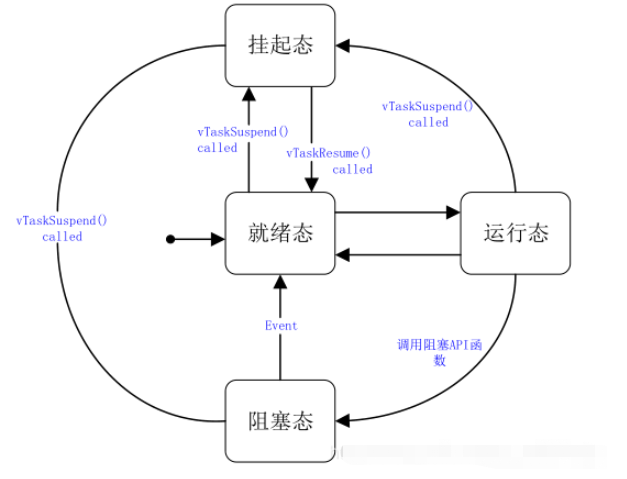
FreeRTOS 中的任務永遠處于下面幾個狀態中的某一個:
當一個任務正在運行時,那么就說這個任務處于運行態,處于運行態的任務就是當前正在使用處理器的任務。如果使用的是單核處理器的話那么不管在任何時刻永遠都只有一個任務處于運行態。
處于就緒態的任務是那些已經準備就緒(這些任務沒有被阻塞或者掛起),可以運行的任務,但是處于就緒態的任務還沒有運行,因為有一個同優先級或者更高優先級的任務正在運行!
如果一個任務當前正在等待某個外部事件的話就說它處于阻塞態,比如說如果某個任務調用了函數 vTaskDelay()的話就會進入阻塞態,直到延時周期完成。任務在等待隊列、信號量、事件組、通知或互斥信號量的時候也會進入阻塞態。任務進入阻塞態會有一個超時時間,當超過這個超時時間任務就會退出阻塞態,即使所等待的事件還沒有來臨!
像阻塞態一樣,任務進入掛起態以后也不能被調度器調用進入運行態,但是進入掛起態的任務沒有超時時間。任務進入和退出掛起態通過調用函數 vTaskSuspend()和 xTaskResume()。
每 個 任 務 都 可 以 分 配 一 個 從 0~(configMAX_PRIORITIES-1) 的 優 先 級 ,configMAX_PRIORITIES 在文件 FreeRTOSConfig.h 中有定義,前面我們講解 FreeRTOS 系統配置的時候已經講過了。如果所使用的硬件平臺支持類似計算前導零這樣的指令(可以通過該指令選 擇 下 一 個 要 運 行 的 任 務 , Cortex-M 處 理 器 是 支 持 該 指 令 的 ) , 并 且 configUSE_PORT_OPTIMISED_TASK_SELECTION 也 設 置 為 了 1 , 那 么 宏configMAX_PRIORITIES 不能超過 32!也就是優先級不能超過 32 級。其他情況下宏configMAX_PRIORITIES 可以為任意值,但是考慮到 RAM 的消耗,宏 configMAX_PRIORITIES最好設置為一個滿足應用的最小值。
優先級數字越低表示任務的優先級越低,0 的優先級最低,configMAX_PRIORITIES-1 的優先級最高。空閑任務的優先級最低,為 0。
FreeRTOS 調度器確保處于就緒態或運行態的高優先級的任務獲取處理器使用權,換句話說就是處于就緒態的最高優先級的任務才會運行。當宏 configUSE_TIME_SLICING 定義為 1 的時候多個任務可以共用一個優先級,數量不限。默認情況下宏configUSE_TIME_SLICING 在文件FreeRTOS.h 中已經定義為 1。此時處于就緒態的優先級相同的任務就會使用時間片輪轉調度器獲取運行時間。
在使用 FreeRTOS 的過程中,我們要使用函數 xTaskCreate()或 xTaskCreateStatic()來創建任務,這兩個函數的第一個參數pxTaskCode,就是這個任務的任務函數。什么是任務函數?任務函數就是完成本任務工作的函數。我這個任務要干嘛?要做什么?要完成什么樣的功能都是在這個任務函數中實現的。 比如我要做個任務,這個任務要點個流水燈,那么這個流水燈的程序就是任務函數中實現的。FreeRTOS 官方給出的任務函數模板如下:
void vATaskFunction(void *pvParameters)
{
for( ; ; )
{
//--任務應用程序--
vTaskDelay();
/*此處不一定要用延時函數,其他只要能讓 FreeRTOS 發生任務切換的 API 函數都可以,
比如請求信號量、隊列等,甚至直接調用任務調度器。只不過最常用的就是 FreeRTOS 的延時函數。*/
}
/*不能從任務函數中返回或者退出,從任務函數中返回或退出的話就會調用
configASSERT(),前提是你定義了 configASSERT()。如果一定要從任務函數中退出的話那一定
要調用函數 vTaskDelete(NULL)來刪除此任務。*/
//vTaskDelete(NULL); (5)
}FreeRTOS 的每個任務都有一些屬性需要存儲,FreeRTOS 把這些屬性集合到一起用一個結構體來表示,這個結構體叫做任務控制塊:TCB_t,在使用函數 xTaskCreate()創建任務的時候就會自動的給每個任務分配一個任務控制塊。在老版本的 FreeRTOS 中任務控制塊叫做 tskTCB,新版本重命名為 TCB_t,但是本質上還是 tskTCB,本教程后面提到任務控制塊的話均用 TCB_t表示,此結構體在文件 tasks.c 中有定義。 FreeRTOS 的任務控制塊中的成員變量相比 UCOSIII 要少很多,而且大多數與裁剪有關,當不使用某些功能的時候與其相關的變量就不參與編譯,任務控制塊大小就會進一步的減小。
typedef struct tskTaskControlBlock{ volatile StackType_t *pxTopOfStack; //任務堆棧棧頂 #if ( portUSING_MPU_WRAPPERS == 1 ) xMPU_SETTINGS xMPUSettings; //MPU 相關設置 #endif ListItem_t xStateListItem; //狀態列表項 ListItem_t xEventListItem; //事件列表項 UBaseType_t uxPriority; //任務優先級 StackType_t *pxStack; //任務堆棧起始地址 char pcTaskName[ configMAX_TASK_NAME_LEN ];//任務名字 #if ( portSTACK_GROWTH > 0 ) StackType_t *pxEndOfStack; //任務堆棧棧底 #endif #if ( portCRITICAL_NESTING_IN_TCB == 1 ) UBaseType_t uxCriticalNesting; //臨界區嵌套深度 #endif #if ( configUSE_TRACE_FACILITY == 1 ) //trace 或到 debug 的時候用到 UBaseType_t uxTCBNumber; UBaseType_t uxTaskNumber; #endif #if ( configUSE_MUTEXES == 1 ) UBaseType_t uxBasePriority; //任務基礎優先級,優先級反轉的時候用到 UBaseType_t uxMutexesHeld; //任務獲取到的互斥信號量個數 #endif #if ( configUSE_APPLICATION_TASK_TAG == 1 ) TaskHookFunction_t pxTaskTag; #endif #if( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 ) //與本地存儲有關 void *pvThreadLocalStoragePointers[ configNUM_THREAD_LOCAL_STORAGE_POINTERS ]; #endif #if( configGENERATE_RUN_TIME_STATS == 1 ) uint32_t ulRunTimeCounter; //用來記錄任務運行總時間 #endif #if ( configUSE_NEWLIB_REENTRANT == 1 ) struct _reent xNewLib_reent; //定義一個 newlib 結構體變量 #endif #if( configUSE_TASK_NOTIFICATIONS == 1 ) //任務通知相關變量 volatile uint32_t ulNotifiedValue; //任務通知值 volatile uint8_t ucNotifyState; //任務通知狀態 #endif #if( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 ) //用來標記任務是動態創建的還是靜態創建的,如果是靜態創建的此變量就為 pdTURE, //如果是動態創建的就為 pdFALSE uint8_t ucStaticallyAllocated; #endif #if( INCLUDE_xTaskAbortDelay == 1 ) uint8_t ucDelayAborted; #endif} tskTCB;//新版本的 FreeRTOS 任務控制塊重命名為 TCB_t,但是本質上還是 tskTCB,主要是為了兼容//舊版本的應用。typedef tskTCB TCB_t;typedef struct tskTaskControlBlock
{
volatile StackType_t *pxTopOfStack; //任務堆棧棧頂
#if ( portUSING_MPU_WRAPPERS == 1 )
xMPU_SETTINGS xMPUSettings; //MPU 相關設置
#endif
ListItem_t xStateListItem; //狀態列表項
ListItem_t xEventListItem; //事件列表項
UBaseType_t uxPriority; //任務優先級
StackType_t *pxStack; //任務堆棧起始地址
char pcTaskName[ configMAX_TASK_NAME_LEN ];//任務名字
#if ( portSTACK_GROWTH > 0 )
StackType_t *pxEndOfStack; //任務堆棧棧底
#endif
#if ( portCRITICAL_NESTING_IN_TCB == 1 )
UBaseType_t uxCriticalNesting; //臨界區嵌套深度
#endif
#if ( configUSE_TRACE_FACILITY == 1 ) //trace 或到 debug 的時候用到
UBaseType_t uxTCBNumber;
UBaseType_t uxTaskNumber;
#endif
#if ( configUSE_MUTEXES == 1 )
UBaseType_t uxBasePriority; //任務基礎優先級,優先級反轉的時候用到
UBaseType_t uxMutexesHeld; //任務獲取到的互斥信號量個數
#endif
#if ( configUSE_APPLICATION_TASK_TAG == 1 )
TaskHookFunction_t pxTaskTag;
#endif
#if( configNUM_THREAD_LOCAL_STORAGE_POINTERS > 0 ) //與本地存儲有關
void *pvThreadLocalStoragePointers[ configNUM_THREAD_LOCAL_STORAGE_POINTERS ];
#endif
#if( configGENERATE_RUN_TIME_STATS == 1 )
uint32_t ulRunTimeCounter; //用來記錄任務運行總時間
#endif
#if ( configUSE_NEWLIB_REENTRANT == 1 )
struct _reent xNewLib_reent; //定義一個 newlib 結構體變量
#endif
#if( configUSE_TASK_NOTIFICATIONS == 1 ) //任務通知相關變量
volatile uint32_t ulNotifiedValue; //任務通知值
volatile uint8_t ucNotifyState; //任務通知狀態
#endif
#if( tskSTATIC_AND_DYNAMIC_ALLOCATION_POSSIBLE != 0 )
//用來標記任務是動態創建的還是靜態創建的,如果是靜態創建的此變量就為 pdTURE,
//如果是動態創建的就為 pdFALSE
uint8_t ucStaticallyAllocated;
#endif
#if( INCLUDE_xTaskAbortDelay == 1 )
uint8_t ucDelayAborted;
#endif
} tskTCB;
//新版本的 FreeRTOS 任務控制塊重命名為 TCB_t,但是本質上還是 tskTCB,主要是為了兼容
//舊版本的應用。
typedef tskTCB TCB_t;FreeRTOS 之所以能正確的恢復一個任務的運行就是因為有任務堆棧在保駕護航,任務調度器在進行任務切換的時候會將當前任務的現場(CPU 寄存器值等)保存在此任務的任務堆棧中,等到此任務下次運行的時候就會先用堆棧中保存的值來恢復現場,恢復現場以后任務就會接著從上次中斷的地方開始運行。
創建任務的時候需要給任務指定堆棧,如果使用的函數 xTaskCreate()創建任務(動態方法)的話那么任務堆棧就會由函數 xTaskCreate()自動創建,后面分析 xTaskCreate()的時候會講解。如果使用函數 xTaskCreateStatic()創建任務(靜態方法)的話就需要程序員自行定義任務堆棧,然后堆棧首地址作為函數的參數 puxStackBuffer 傳遞給函數。
任務堆棧的數據類型為 StackType_t,StackType_t 本質上是 uint32_t,在 portmacro.h 中有定義。所以 StackType_t 類型的變量為 4 個字節,那么任務的實際堆棧大小就應該是我們所定義的 4 倍。
到此,相信大家對“FreeRTOS實時操作系統多任務管理基礎知識有哪些”有了更深的了解,不妨來實際操作一番吧!這里是億速云網站,更多相關內容可以進入相關頻道進行查詢,關注我們,繼續學習!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





