溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹“怎么用Unity計算出汽車前后輪倒車軌跡”,在日常操作中,相信很多人在怎么用Unity計算出汽車前后輪倒車軌跡問題上存在疑惑,小編查閱了各式資料,整理出簡單好用的操作方法,希望對大家解答”怎么用Unity計算出汽車前后輪倒車軌跡”的疑惑有所幫助!接下來,請跟著小編一起來學習吧!
汽車前后輪倒車軌跡計算附C#源碼(Unity),供大家參考,具體內容如下
原理很簡單, 都是高中的幾何數學部分
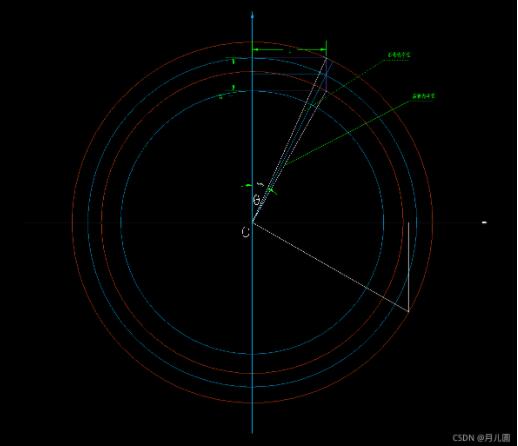
需要的參數有:
車前后軸距;
車寬(左前輪與右前輪距離);
當前車輪角度(多數車33.5°);
是否要繪制前輪軌跡線;
///<summary>
/// 獲取行車軌跡預測index = 0 left軌跡
/// </summary>
/// <param name="steeringAngle">方向盤角度</param>
/// <param name="carWheelbase">汽車前后軸距</param>
/// <param name="carWidth">車寬</param>
/// <param name="length">點位密度</param>
/// <param name="isFront">是否是前輪</param>
/// <param name="maxAngle">軌跡的最大轉彎角度</param>
/// <returns>交叉數組,下標為0的是右邊線, 下表為1的是左邊線</returns>
public Vector3[][] GetCarTrack(float steeringAngle, float carWheelbase, float carWidth, float length, bool isFront, float maxAngle = 90f)
{
float maxSteerAngle = _carControl._vehicleController.steering.maxSteerAngle;
float theta = Mathf.Abs(steeringAngle / 180 * Mathf.PI);
Vector3[][] track = new Vector3[2][];
List<Vector3> trackLeft = new List<Vector3>();
List<Vector3> trackRight = new List<Vector3>();
if (theta == 0)
{
for (float i = 0; i < length; i++)
{
float x = i / length * 5;
if (isFront)
{
x *= 1;
trackLeft.Add(new Vector3(x, 0f, carWidth));
trackRight.Add(new Vector3(x, 0f, 0f));
}
else
{
x *= -1;
trackLeft.Add(new Vector3(x, 0, carWidth));
trackRight.Add(new Vector3(x, 0, 0));
}
}
}
else
{
if (isFront)
{
float r = (carWheelbase / Mathf.Tan(theta) + carWidth / 2) / Mathf.Cos(theta);
float rMin = Mathf.Cos(theta) * r - carWidth;
float theta1 = Mathf.Atan(carWheelbase / rMin);
rMin = rMin / Mathf.Cos(theta1);
float rMax = rMin + carWidth;
float lineAngle = carWheelbase / (rMax * 2f * Mathf.PI) * 360f;
for (int i = 0; i <= length; i++)
{
if (i / length >= (maxAngle - lineAngle) / maxAngle)
{
float x = rMin * Mathf.Cos(maxAngle / length * i * Mathf.Deg2Rad);
float z = rMin * Mathf.Sin(maxAngle / length * i * Mathf.Deg2Rad);
if (x >= carWheelbase)
{
if (steeringAngle > 0)
{
trackRight.Add(new Vector3(x - carWheelbase, 0, z - rMin + steeringAngle / maxSteerAngle * (carWidth / 2)));
}
else
{
trackRight.Add(new Vector3(x - carWheelbase, 0, -(z - rMin) + carWidth + steeringAngle / maxSteerAngle * (carWidth / 2)));
}
}
x = rMax * Mathf.Cos(maxAngle / length * i * Mathf.Deg2Rad);
z = rMax * Mathf.Sin(maxAngle / length * i * Mathf.Deg2Rad);
if (x >= carWheelbase)
{
if (steeringAngle > 0)
{
trackLeft.Add(new Vector3(x - carWheelbase, 0, z - rMin + steeringAngle / maxSteerAngle * (carWidth / 2)));
}
else
{
trackLeft.Add(new Vector3(x - carWheelbase, 0, -(z - rMin) + carWidth + steeringAngle / maxSteerAngle * (carWidth / 2)));
}
}
}
}
trackRight[trackRight.Count - 1] = Vector3.forward * trackRight[trackRight.Count - 1].z;
trackLeft[trackLeft.Count - 1] = Vector3.forward * trackLeft[trackLeft.Count - 1].z;
}
else
{
float r = (carWheelbase / Mathf.Tan(theta) + carWidth / 2) / Mathf.Cos(theta);
float rMin = Mathf.Cos(theta) * r - carWidth;
float rMax = rMin + carWidth;
float lineAngle = carWheelbase / (rMin * 2f * Mathf.PI) * 360f;
for (int i = 0; i <= length; i++)
{
if (i / length >= (maxAngle - lineAngle) / maxAngle)
{
float x = -rMin * Mathf.Cos(maxAngle / length * i * Mathf.Deg2Rad);
float z = rMin * Mathf.Sin(maxAngle / length * i * Mathf.Deg2Rad);
if (steeringAngle > 0)
{
trackRight.Add(new Vector3(x, 0, z - rMin));
}
else
{
trackRight.Add(new Vector3(x, 0, -(z - rMin) + carWidth));
}
x = -rMax * Mathf.Cos(maxAngle / length * i * Mathf.Deg2Rad);
z = rMax * Mathf.Sin(maxAngle / length * i * Mathf.Deg2Rad);
if (steeringAngle > 0)
{
trackLeft.Add(new Vector3(x, 0, z - rMin));
}
else
{
trackLeft.Add(new Vector3(x, 0, -(z - rMin) + carWidth));
}
}
}
trackRight[trackRight.Count - 1] = Vector3.forward * trackRight[trackRight.Count - 1].z;
trackLeft[trackLeft.Count - 1] = Vector3.forward * trackLeft[trackLeft.Count - 1].z;
}
}
track[0] = trackLeft.ToArray();
track[1] = trackRight.ToArray();
trackLeft = trackRight = null;
return track;
}到此,關于“怎么用Unity計算出汽車前后輪倒車軌跡”的學習就結束了,希望能夠解決大家的疑惑。理論與實踐的搭配能更好的幫助大家學習,快去試試吧!若想繼續學習更多相關知識,請繼續關注億速云網站,小編會繼續努力為大家帶來更多實用的文章!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





