溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
項目描述:
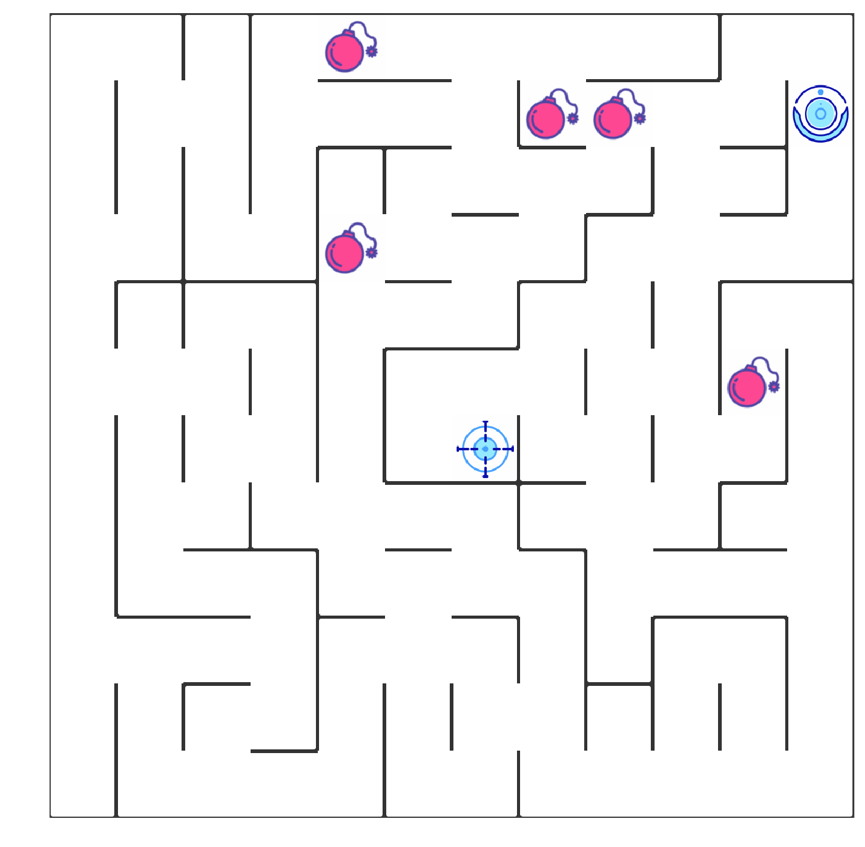
在該項目中,你將使用強化學習算法,實現一個自動走迷宮機器人。
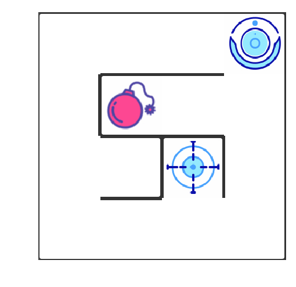
如上圖所示,智能機器人顯示在右上角。在我們的迷宮中,有陷阱(紅色×××)及終點(藍色的目標點)兩種情景。機器人要盡量避開陷阱、盡快到達目的地。
小車可執行的動作包括:向上走 u、向右走 r、向下走 d、向左走l。
執行不同的動作后,根據不同的情況會獲得不同的獎勵,具體而言,有以下幾種情況。
我們需要通過修改 robot.py 中的代碼,來實現一個 Q Learning 機器人,實現上述的目標。
Section 1 算法理解
1.1 強化學習總覽
強化學習作為機器學習算法的一種,其模式也是讓智能體在“訓練”中學到“經驗”,以實現給定的任務。但不同于監督學習與非監督學習,在強化學習的框架中,我們更側重通過智能體與環境的交互來學習。通常在監督學習和非監督學習任務中,智能體往往需要通過給定的訓練集,輔之以既定的訓練目標(如最小化損失函數),通過給定的學習算法來實現這一目標。然而在強化學習中,智能體則是通過其與環境交互得到的獎勵進行學習。這個環境可以是虛擬的(如虛擬的迷宮),也可以是真實的(自動駕駛汽車在真實道路上收集數據)。
在強化學習中有五個核心組成部分,它們分別是:環境(Environment)、智能體(Agent)、狀態(State)、動作(Action)和獎勵(Reward)。在某一時間節點t:
智能體在從環境中感知其所處的狀態
智能體根據某些準則選擇動作 
環境根據智能體選擇的動作,向智能體反饋獎勵 
通過合理的學習算法,智能體將在這樣的問題設置下,成功學到一個在狀態 選擇動作 的策略 。
1.2 計算Q值
在我們的項目中,我們要實現基于 Q-Learning 的強化學習算法。Q-Learning 是一個值迭代(Value Iteration)算法。與策略迭代(Policy Iteration)算法不同,值迭代算法會計算每個”狀態“或是”狀態-動作“的值(Value)或是效用(Utility),然后在執行動作的時候,會設法最大化這個值。因此,對每個狀態值的準確估計,是我們值迭代算法的核心。通常我們會考慮最大化動作的長期獎勵,即不僅考慮當前動作帶來的獎勵,還會考慮動作長遠的獎勵。
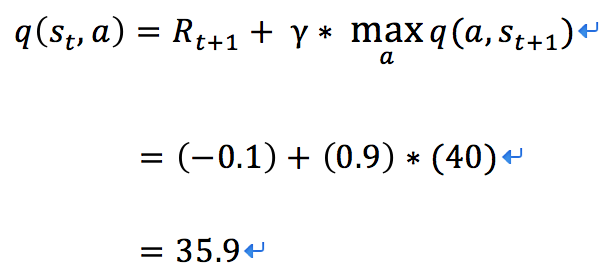
在 Q-Learning 算法中,我們把這個長期獎勵記為 Q 值,我們會考慮每個 ”狀態-動作“ 的 Q 值,具體而言,它的計算公式為:

也就是對于當前的“狀態-動作”  ,我們考慮執行動作
,我們考慮執行動作  后環境給我們的獎勵
后環境給我們的獎勵 ,以及執行動作
,以及執行動作  到達
到達  后,執行任意動作能夠獲得的最大的Q值
后,執行任意動作能夠獲得的最大的Q值 ,
, 為折扣因子。
為折扣因子。
不過一般地,我們使用更為保守地更新 Q 表的方法,即引入松弛變量 alpha,按如下的公式進行更新,使得 Q 表的迭代變化更為平緩。

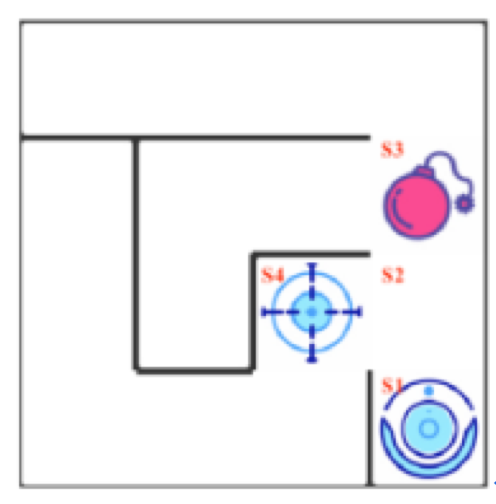
根據已知條件求 。
。
已知:如上圖,機器人位于 s1,行動為 u,行動獲得的獎勵與題目的默認設置相同。在 s2 中執行各動作的 Q 值為:u: -24,r: -13,d: -0.29、l: +40,γ取0.9。
1.3 如何選擇動作
在強化學習中,「探索-利用」問題是非常重要的問題。具體來說,根據上面的定義,我們會盡可能地讓機器人在每次選擇最優的決策,來最大化長期獎勵。但是這樣做有如下的弊端:
因此我們需要一種辦法,來解決如上的問題,增加機器人的探索。由此我們考慮使用 epsilon-greedy 算法,即在小車選擇動作的時候,以一部分的概率隨機選擇動作,以一部分的概率按照最優的 Q 值選擇動作。同時,這個選擇隨機動作的概率應當隨著訓練的過程逐步減小。
在如下的代碼塊中,實現 epsilon-greedy 算法的邏輯,并運行測試代碼。
import random
import operator
actions = ['u','r','d','l']
qline = {'u':1.2, 'r':-2.1, 'd':-24.5, 'l':27}
epsilon = 0.3 # 以0.3的概率進行隨機選擇
def choose_action(epsilon):
action = None
if random.uniform(0,1.0) <= epsilon: # 以某一概率
action = random.choice(actions)# 實現對動作的隨機選擇
else:
action = max(qline.items(), key=operator.itemgetter(1))[0] # 否則選擇具有最大 Q 值的動作
return action
range(100): res += choose_action(epsilon) print(res) res = '' for i in range(100): res += choose_action(epsilon) print(res) ldllrrllllrlldlldllllllllllddulldlllllldllllludlldllllluudllllllulllllllllllullullllllllldlulllllrlr
Section 2 代碼實現
2.1 Maze 類理解
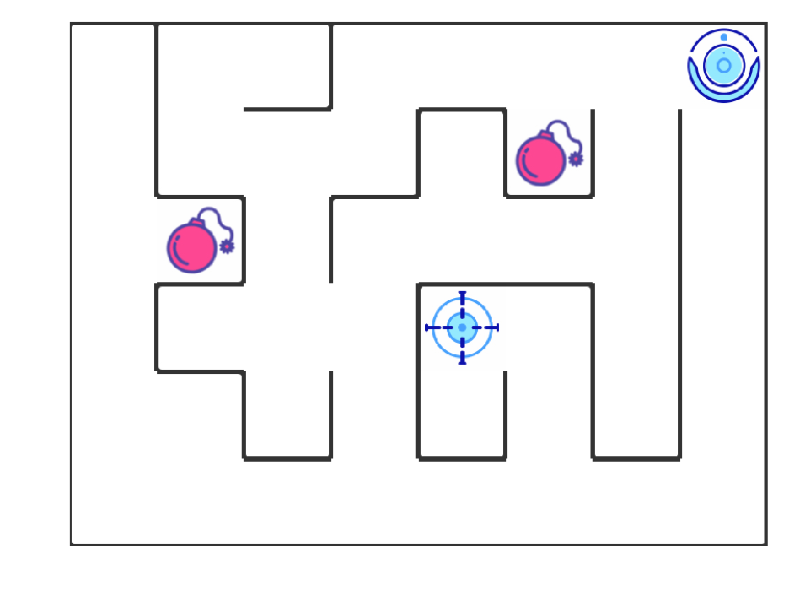
我們首先引入了迷宮類 Maze,這是一個非常強大的函數,它能夠根據你的要求隨機創建一個迷宮,或者根據指定的文件,讀入一個迷宮地圖信息。
Maze("file_name") 根據指定文件創建迷宮,或者使用 Maze(maze_size=(height, width))來隨機生成一個迷宮。trap number 參數,在創建迷宮的時候,設定迷宮中陷阱的數量。g=Maze("xx.txt"),那么直接輸入 g 即可。在如下的代碼塊中,創建你的迷宮并展示。
from Maze import Maze %matplotlib inline %confer InlineBackend.figure_format = 'retina' ## to-do: 創建迷宮并展示 g=Maze(maze_size=(6,8), trap_number=1) g Maze of size (12, 12 )

你可能已經注意到,在迷宮中我們已經默認放置了一個機器人。實際上,我們為迷宮配置了相應的 API,來幫助機器人的移動與感知。其中你隨后會使用的兩個 API 為 maze.sense_robot() 及 maze.move_robot() 。
maze.sense_robot() 為一個無參數的函數,輸出機器人在迷宮中目前的位置。maze.move_robot(direction) 對輸入的移動方向,移動機器人,并返回對應動作的獎勵值。隨機移動機器人,并記錄下獲得的獎勵,展示出機器人最后的位置。
rewards = [] ## 循環、隨機移動機器人10次,記錄下獎勵 for i in range(10): res = g.move_robot(random. Choice(actions)) rewards.append(res) ## 輸出機器人最后的位置 print(g.sense_robot()) ## 打印迷宮,觀察機器人位置 g (0,9)

2.2 Robot 類實現
Robot 類是我們需要重點實現的部分。在這個類中,我們需要實現諸多功能,以使得我們成功實現一個強化學習智能體。總體來說,之前我們是人為地在環境中移動了機器人,但是現在通過實現 Robot 這個類,機器人將會自己移動。通過實現學習函數,Robot 類將會學習到如何選擇最優的動作,并且更新強化學習中對應的參數。
首先 Robot 有多個輸入,其中 alpha=0.5, gamma=0.9, epsilon0=0.5 表征強化學習相關的各個參數的默認值,這些在之前你已經了解到,Maze 應為機器人所在迷宮對象。
隨后觀察 Robot.update 函數,它指明了在每次執行動作時,Robot 需要執行的程序。按照這些程序,各個函數的功能也就明了了。
運行如下代碼檢查效果(記得將 maze 變量修改為你創建迷宮的變量名)。
import random
import operator
class Robot(object):
def __init__(self, maze, alpha=0.5, gamma=0.9, epsilon0=0.5):
self. Maze = maze
self.valid_actions = self.maze.valid_actions
self.state = None
self.action = None
# Set Parameters of the Learning Robot
self.alpha = alpha
self.gamma = gamma
self.epsilon0 = epsilon0
self. Epsilon = epsilon0
self.t = 0
self.Qtable = {}
self. Reset()
def. reset(self):
"""
Reset the robot
"""
self.state = self.sense_state()
self.create_Qtable_line(self.state)
def. set status(self, learning=False, testing=False):
"""
Determine whether the robot is learning its q table, or
executing the testing procedure.
"""
self. Learning = learning
self.testing = testing
def. update_parameter(self):
"""
Some of the paramters of the q learning robot can be altered,
update these parameters when necessary.
"""
if self.testing:
# TODO 1. No random choice when testing
self. Epsilon = 0
else:
# TODO 2. Update parameters when learning
self. Epsilon *= 0.95
return self. Epsilon
def. sense_state(self):
"""
Get the current state of the robot. In this
"""
# TODO 3. Return robot's current state
return self.maze.sense_robot()
def. create_Qtable_line(self, state):
"""
Create the qtable with the current state
"""
# TODO 4. Create qtable with current state
# Our qtable should be a two level dict,
# Qtable[state] ={'u':xx, 'd':xx, ...}
# If Qtable[state] already exits, then do
# not change it.
self.Qtable.setdefault(state, {a: 0.0 for a in self.valid_actions})
def. choose_action(self):
"""
Return an action according to given rules
"""
def. is_random_exploration():
# TODO 5. Return whether do random choice
# hint: generate a random number, and compare
# it with epsilon
return random.uniform(0, 1.0) <= self. Epsilon
if self. Learning:
if is_random_exploration():
# TODO 6. Return random choose aciton
return random. Choice(self.valid_actions)
else:
# TODO 7. Return action with highest q value
return max(self.Qtable[self.state].items(), key=operator.itemgetter(1))[0]
elif self.testing:
# TODO 7. choose action with highest q value
return max(self.Qtable[self.state].items(), key=operator.itemgetter(1))[0]
else:
# TODO 6. Return random choose aciton
return random. Choice(self.valid_actions)
def. update_Qtable(self, r, action, next_state):
"""
Update the qtable according to the given rule.
"""
if self. Learning:
# TODO 8. When learning, update the q table according
# to the given rules
self.Qtable[self.state][action] = (1 - self.alpha) * self.Qtable[self.state][action] + self.alpha * (
r + self.gamma * max(self.Qtable[next_state].values()))
def. update(self):
"""
Describle the procedure what to do when update the robot.
Called every time in every epoch in training or testing.
Return current action and reward.
"""
self.state = self.sense_state() # Get the current state
self.create_Qtable_line(self.state) # For the state, create q table line
action = self.choose_action() # choose action for this state
reward = self.maze.move_robot(action) # move robot for given action
next_state = self.sense_state() # get next state
self.create_Qtable_line(next_state) # create q table line for next state
if self. Learning and not self.testing:
self.update_Qtable(reward, action, next_state) # update q table
self.update_parameter() # update parameters
return action, reward
# from Robot import Robot
# g=Maze(maze_size=(6,12), trap_number=2)
g=Maze("test_world\maze_01.txt")
robot = Robot(g) # 記得將 maze 變量修改為你創建迷宮的變量名
robot.set_status(learning=True,testing=False)
print(robot.update())
g
('d', -0.1)
Maze of size (12, 12)
2.3 用 Runner 類訓練 Robot
在完成了上述內容之后,我們就可以開始對我們 Robot 進行訓練并調參了。我們準備了又一個非常棒的類 Runner ,來實現整個訓練過程及可視化。使用如下的代碼,你可以成功對機器人進行訓練。并且你會在當前文件夾中生成一個名為 filename 的視頻,記錄了整個訓練的過程。通過觀察該視頻,你能夠發現訓練過程中的問題,并且優化你的代碼及參數。
嘗試利用下列代碼訓練機器人,并進行調參。可選的參數包括:
epochepsilon0 (epsilon 初值)epsilon 衰減(可以是線性、指數衰減,可以調整衰減的速度),你需要在 Robot.py 中調整alphagammafrom Runner import Runner g = Maze(maze_size=maze_size,trap_number=trap_number) r = Robot(g,alpha=alpha, epsilon0=epsilon0, gamma=gamma) r.set_status(learning=True) runner = Runner(r, g) runner.run_training(epoch, display_direction=True) #runner.generate_movie(filename = "final1.mp4") # 你可以注釋該行代碼,加快運行速度,不過你就無法觀察到視頻了。 g
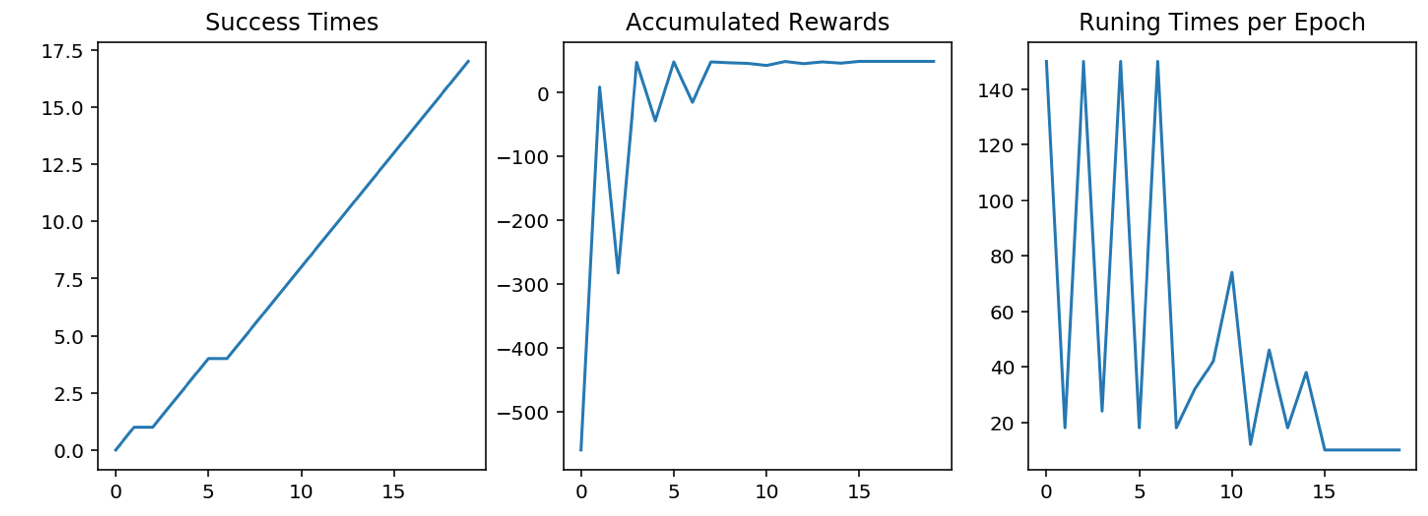
使用 runner.plot_results() 函數,能夠打印機器人在訓練過程中的一些參數信息。
使用 runner.plot_results() 輸出訓練結果
runner.plot_results()
以上就是本文的全部內容,希望對大家的學習有所幫助,也希望大家多多支持億速云。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





