溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
在單線程編程中我們會經常用到一些集合類,比如ArrayList,HashMap等,但是這些類都不是線程安全的類。在面試中也經常會有一些考點,比如ArrayList不是線程安全的,Vector是線程安全。而保障Vector線程安全的方式,是非常粗暴的在方法上用synchronized獨占鎖,將多線程執行變成串行化。要想將ArrayList變成線程安全的也可以使用Collections.synchronizedList(List<T> list)方法ArrayList轉換成線程安全的,但這種轉換方式依然是通過synchronized修飾方法實現的,很顯然這不是一種高效的方式,同時,隊列也是我們常用的一種數據結構,為了解決線程安全的問題,Doug Lea大師為我們準備了ConcurrentLinkedQueue這個線程安全的隊列。從類名就可以看的出來實現隊列的數據結構是鏈式。
要想先學習ConcurrentLinkedQueue自然而然得先從它的節點類看起,明白它的底層數據結構。Node類的源碼為:
private?static?class?Node<E>?{
????????volatile?E?item;
????????volatile?Node<E>?next;
????????.......}Node節點主要包含了兩個域:一個是數據域item,另一個是next指針,用于指向下一個節點從而構成鏈式隊列。并且都是用volatile進行修飾的,以保證內存可見性。另外ConcurrentLinkedQueue含有這樣兩個成員變量:
private?transient?volatile?Node<E>?head;private?transient?volatile?Node<E>?tail;
說明ConcurrentLinkedQueue通過持有頭尾指針進行管理隊列。當我們調用無參構造器時,其源碼為:
public?ConcurrentLinkedQueue()?{
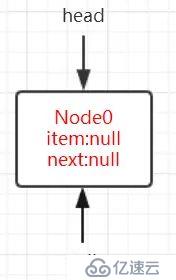
????head?=?tail?=?new?Node<E>(null);}head和tail指針會指向一個item域為null的節點,此時ConcurrentLinkedQueue狀態如下圖所示:
如圖,head和tail指向同一個節點Node0,該節點item域為null,next域為null。
在隊列進行出隊入隊的時候免不了對節點需要進行操作,在多線程就很容易出現線程安全的問題。可以看出在處理器指令集能夠支持CMPXCHG指令后,在java源碼中涉及到并發處理都會使用CAS操作,那么在ConcurrentLinkedQueue對Node的CAS操作有這樣幾個:
//更改Node中的數據域item???
boolean?casItem(E?cmp,?E?val)?{
????return?UNSAFE.compareAndSwapObject(this,?itemOffset,?cmp,?val);}//更改Node中的指針域nextvoid?lazySetNext(Node<E>?val)?{
????UNSAFE.putOrderedObject(this,?nextOffset,?val);}//更改Node中的指針域nextboolean?casNext(Node<E>?cmp,?Node<E>?val)?{
????return?UNSAFE.compareAndSwapObject(this,?nextOffset,?cmp,?val);}可以看出這些方法實際上是通過調用UNSAFE實例的方法,UNSAFE為sun.misc.Unsafe類,該類是hotspot底層方法,目前為止了解即可,知道CAS的操作歸根結底是由該類提供就好。
對一個隊列來說,插入滿足FIFO特性,插入元素總是在隊列最末尾的地方進行插入,而取(移除)元素總是從隊列的隊頭。所有要想能夠徹底弄懂ConcurrentLinkedQueue自然而然是從offer方法和poll方法開始。那么為了能夠理解offer方法,采用debug的方式來一行一行的看代碼走。另外,在看多線程的代碼時,可采用這樣的思維方式:
單個線程offer?多個線程offer?部分線程offer,部分線程poll?----offer的速度快于poll --------隊列長度會越來越長,由于offer節點總是在對隊列隊尾,而poll節點總是在隊列對頭,也就是說offer線程和poll線程兩者并無“交集”,也就是說兩類線程間并不會相互影響,這種情況站在相對速率的角度來看,也就是一個"單線程offer" ----offer的速度慢于poll --------poll的相對速率快于offer,也就是隊頭刪的速度要快于隊尾添加節點的速度,導致的結果就是隊列長度會越來越短,而offer線程和poll線程就會出現“交集”,即那一時刻就可以稱之為offer線程和poll線程同時操作的節點為?臨界點?,且在該節點offer線程和poll線程必定相互影響。根據在臨界點時offer和poll發生的相對順序又可從兩個角度去思考:1. 執行順序為offer-->poll-->offer,即表現為當offer線程在Node1后插入Node2時,此時poll線程已經將Node1刪除,這種情況很顯然需要在offer方法中考慮;?2.執行順序可能為:poll-->offer-->poll,即表現為當poll線程準備刪除的節點為null時(隊列為空隊列),此時offer線程插入一個節點使得隊列變為非空隊列
先看這么一段代碼:
1\.?ConcurrentLinkedQueue<Integer>?queue?=?new?ConcurrentLinkedQueue<>();2\.?queue.offer(1);3\.?queue.offer(2);
創建一個ConcurrentLinkedQueue實例,先offer 1,然后再offer 2。offer的源碼為:
public?boolean?offer(E?e)?{1\.????checkNotNull(e);2\.????final?Node<E>?newNode?=?new?Node<E>(e);3\.????for?(Node<E>?t?=?tail,?p?=?t;;)?{4\.????????Node<E>?q?=?p.next;5\.????????if?(q?==?null)?{6\.????????????//?p?is?last?node7\.????????????if?(p.casNext(null,?newNode))?{
????????????????//?Successful?CAS?is?the?linearization?point????????????????//?for?e?to?become?an?element?of?this?queue,???????????????//?and?for?newNode?to?become?"live".8\.????????????????if?(p?!=?t)?//?hop?two?nodes?at?a?time9\.????????????????????casTail(t,?newNode);??//?Failure?is?OK.10\.????????????????return?true;
????????????}
????????????//?Lost?CAS?race?to?another?thread;?re-read?next????????}11\.????????else?if?(p?==?q)
????????????//?We?have?fallen?off?list.??If?tail?is?unchanged,?it????????????//?will?also?be?off-list,?in?which?case?we?need?to????????????//?jump?to?head,?from?which?all?live?nodes?are?always????????????//?reachable.??Else?the?new?tail?is?a?better?bet.12\.????????????p?=?(t?!=?(t?=?tail))???t?:?head;
???????????else
????????????//?Check?for?tail?updates?after?two?hops.13\.????????????p?=?(p?!=?t?&&?t?!=?(t?=?tail))???t?:?q;
????}}單線程執行角度分析:
先從單線程執行的角度看起,分析offer 1的過程。第1行代碼會對是否為null進行判斷,為null的話就直接拋出空指針異常,第2行代碼將e包裝成一個Node類,第3行為for循環,只有初始化條件沒有循環結束條件,這很符合CAS的“套路”,在循環體CAS操作成功會直接return返回,如果CAS操作失敗的話就在for循環中不斷重試直至成功。
這里實例變量t被初始化為tail,p被初始化為t即tail。為了方便下面的理解,p被認為隊列真正的尾節點,tail不一定指向對象真正的尾節點,因為在ConcurrentLinkedQueue中tail是被延遲更新的,具體原因我們慢慢來看。代碼走到第3行的時候,t和p都分別指向初始化時創建的item域為null,next域為null的Node0。
第4行變量q被賦值為null,第5行if判斷為true,在第7行使用casNext將插入的Node設置成當前隊列尾節點p的next節點,如果CAS操作失敗,此次循環結束在下次循環中進行重試。CAS操作成功走到第8行,此時p==t,if判斷為false,直接return true返回。如果成功插入1的話,此時ConcurrentLinkedQueue的狀態如下圖所示:
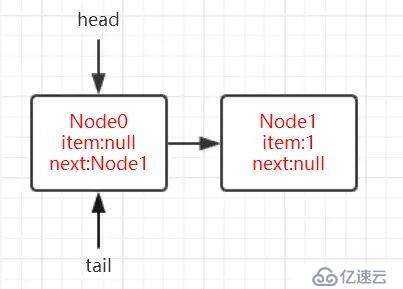
如圖,此時隊列的尾節點應該為Node1,而tail指向的節點依然還是Node0,因此可以說明tail是延遲更新的。那么我們繼續來看offer 2的時候的情況,很顯然此時第4行q指向的節點不為null了,而是指向Node1,第5行if判斷為false,第11行if判斷為false,代碼會走到第13行。
好了,再插入節點的時候我們會問自己這樣一個問題?上面已經解釋了tail并不是指向隊列真正的尾節點,那么在插入節點的時候,我們是不是應該最開始做的就是找到隊列當前的尾節點在哪里才能插入?那么第13行代碼就是找出隊列真正的尾節點。
定位隊列真正的對尾節點
p?=?(p?!=?t?&&?t?!=?(t?=?tail))???t?:?q;
我們來分析一下這行代碼,如果這段代碼在單線程環境執行時,很顯然由于p==t,此時p會被賦值為q,而q等于Node<E> q = p.next,即Node1。在第一次循環中指針p指向了隊列真正的隊尾節點Node1,那么在下一次循環中第4行q指向的節點為null,那么在第5行中if判斷為true,那么在第7行依然通過casNext方法設置p節點的next為當前新增的Node,接下來走到第8行,這個時候p!=t,第8行if判斷為true,會通過casTail(t, newNode)將當前節點Node設置為隊列的隊尾節點,此時的隊列狀態示意圖如下圖所示:
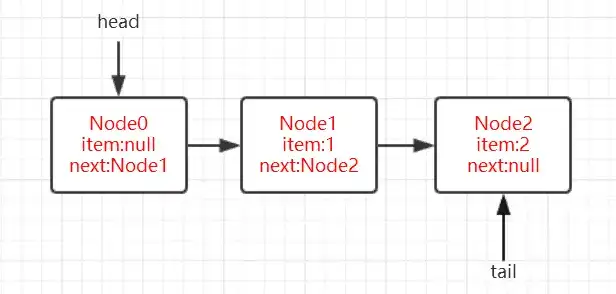
tail指向的節點由Node0改變為Node2,這里的casTail失敗不需要重試的原因是,offer代碼中主要是通過p的next節點q(Node<E> q = p.next)決定后面的邏輯走向的,當casTail失敗時狀態示意圖如下
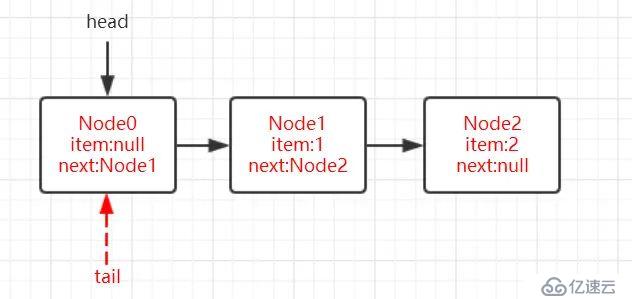
如圖,如果這里casTail設置tail失敗即tail還是指向Node0節點的話,無非就是多循環幾次通過13行代碼定位到隊尾節點。
通過對單線程執行角度進行分析,我們可以了解到poll的執行邏輯為:
如果tail指向的節點的下一個節點(next域)為null的話,說明tail指向的節點即為隊列真正的隊尾節點,因此可以通過casNext插入當前待插入的節點,但此時tail并未變化,如圖2;
如果tail指向的節點的下一個節點(next域)不為null的話,說明tail指向的節點不是隊列的真正隊尾節點。通過q(Node<E> q = p.next)指針往前遞進去找到隊尾節點,然后通過casNext插入當前待插入的節點,并通過casTail方式更改tail,如圖3。
我們回過頭再來看p = (p != t && t != (t = tail)) ? t : q;這行代碼在單線程中,這段代碼永遠不會將p賦值為t,那么這么寫就不會有任何作用,那我們試著在多線程的情況下進行分析。
多線程執行角度分析
多個線程offer
很顯然這么寫另有深意,其實在多線程環境下這行代碼很有意思的。?t != (t = tail)這個操作并非一個原子操作,有這樣一種情況:
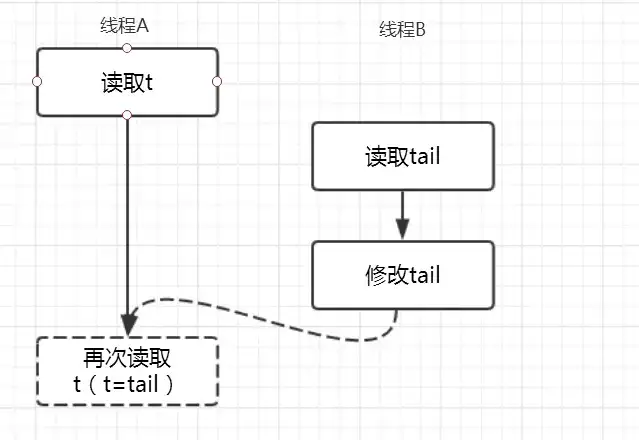
如圖,假設線程A此時讀取了變量t,線程B剛好在這個時候offer一個Node后,此時會修改tail指針,那么這個時候線程A再次執行t=tail時t會指向另外一個節點,很顯然線程A前后兩次讀取的變量t指向的節點不相同,即t != (t = tail)為true,并且由于t指向節點的變化p != t也為true,此時該行代碼的執行結果為p和t最新的t指針指向了同一個節點,并且此時t也是隊列真正的對尾節點。那么,現在已經定位到隊列真正的隊尾節點,就可以執行offer操作了。
offer->poll->offer
那么還剩下第11行的代碼我們沒有分析,大致可以猜想到應該就是回答一部分線程offer,一部分poll的這種情況。當if (p == q)為true時,說明p指向的節點的next也指向它自己,這種節點稱之為哨兵節點,這種節點在隊列中存在的價值不大,一般表示為要刪除的節點或者是空節點。為了能夠很好的理解這種情況,我們先看看poll方法的執行過程后,再回過頭來看,總之這是一個很有意思的事情 :)。
poll方法源碼如下:
public?E?poll()?{????restartFromHead:
????1\.?for?(;;)?{
????2\.????for?(Node<E>?h?=?head,?p?=?h,?q;;)?{
????3\.????????E?item?=?p.item;
????4\.????????if?(item?!=?null?&&?p.casItem(item,?null))?{
????????????????//?Successful?CAS?is?the?linearization?point????????????????//?for?item?to?be?removed?from?this?queue.????5\.????????????if?(p?!=?h)?//?hop?two?nodes?at?a?time????6\.????????????????updateHead(h,?((q?=?p.next)?!=?null)???q?:?p);
????7\.????????????return?item;
????????????}
????8\.????????else?if?((q?=?p.next)?==?null)?{
????9\.????????????updateHead(h,?p);
????10\.????????????return?null;
????????????}
????11\.????????else?if?(p?==?q)
????12\.????????????continue?restartFromHead;
????????????else
????13\.????????????p?=?q;
????????}
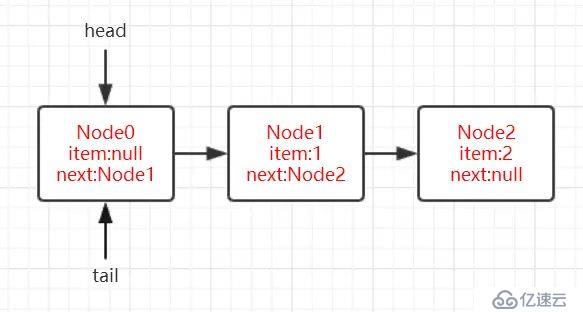
????}}我們還是先站在單線程的角度去理清該方法的基本邏輯。假設ConcurrentLinkedQueue初始狀態如下圖所示:
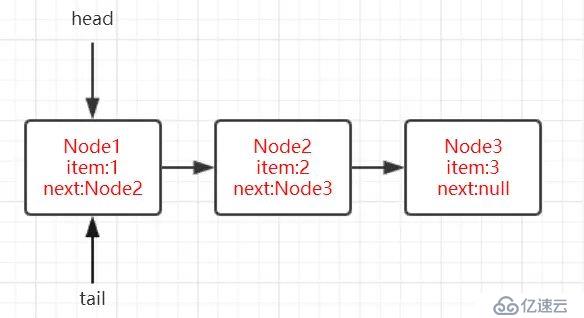
參數offer時的定義,我們還是先將變量p作為隊列要刪除真正的隊頭節點,h(head)指向的節點并不一定是隊列的隊頭節點。先來看poll出Node1時的情況,由于p=h=head,參照上圖,很顯然此時p指向的Node1的數據域不為null,在第4行代碼中item!=null判斷為true后接下來通過casItem將Node1的數據域設置為null。
如果CAS設置失敗則此次循環結束等待下一次循環進行重試。若第4行執行成功進入到第5行代碼,此時p和h都指向Node1,第5行if判斷為false,然后直接到第7行return回Node1的數據域1,方法運行結束,此時的隊列狀態如下圖。
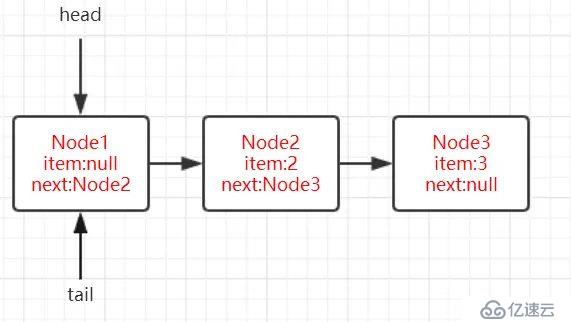
下面繼續從隊列中poll,很顯然當前h和p指向的Node1的數據域為null,那么第一件事就是要定位準備刪除的隊頭節點(找到數據域不為null的節點)。
定位刪除的隊頭節點
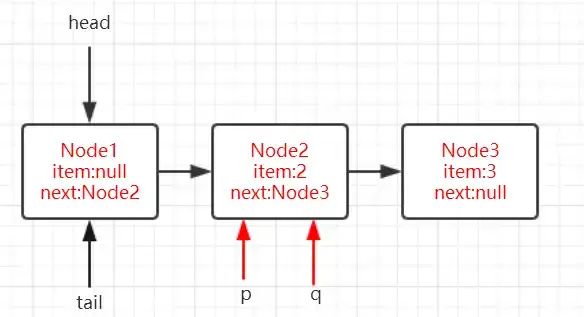
繼續看,第三行代碼item為null,第4行代碼if判斷為false,走到第8行代碼(q = p.next)if也為false,由于q指向了Node2,在第11行的if判斷也為false,因此代碼走到了第13行,這個時候p和q共同指向了Node2,也就找到了要刪除的真正的隊頭節點。
可以總結出,定位待刪除的隊頭節點的過程為:如果當前節點的數據域為null,很顯然該節點不是待刪除的節點,就用當前節點的下一個節點去試探。在經過第一次循環后,此時狀態圖為下圖:
進行下一次循環,第4行的操作同上述,當前假設第4行中casItem設置成功,由于p已經指向了Node2,而h還依舊指向Node1,此時第5行的if判斷為true,然后執行updateHead(h, ((q = p.next) != null) ? q : p),此時q指向的Node3,所有傳入updateHead方法的分別是指向Node1的h引用和指向Node3的q引用。updateHead方法的源碼為:
final?void?updateHead(Node<E>?h,?Node<E>?p)?{
????if?(h?!=?p?&&?casHead(h,?p))
????????h.lazySetNext(h);
}該方法主要是通過casHead將隊列的head指向Node3,并且通過?h.lazySetNext將Node1的next域指向它自己。最后在第7行代碼中返回Node2的值。此時隊列的狀態如下圖所示:
Node1的next域指向它自己,head指向了Node3。如果隊列為空隊列的話,就會執行到代碼的第8行(q = p.next) == null,if判斷為true,因此在第10行中直接返回null。以上的分析是從單線程執行的角度去看,也可以讓我們了解poll的整體思路,現在來做一個總結:
如果當前head,h和p指向的節點的Item不為null的話,說明該節點即為真正的隊頭節點(待刪除節點),只需要通過casItem方法將item域設置為null,然后將原來的item直接返回即可。
如果當前head,h和p指向的節點的item為null的話,則說明該節點不是真正的待刪除節點,那么應該做的就是尋找item不為null的節點。通過讓q指向p的下一個節點(q = p.next)進行試探,若找到則通過updateHead方法更新head指向的節點以及構造哨兵節點(通過updateHead方法的h.lazySetNext(h))。
接下來,按照上面分析offer的思維方式,下面來分析一下多線程的情況,第一種情況是;
多線程執行情況分析:
多個線程poll
現在回過頭來看poll方法的源碼,有這樣一部分:
else?if?(p?==?q) ????continue?restartFromHead;
這一部分就是處理多個線程poll的情況,q = p.next也就是說q永遠指向的是p的下一個節點,那么什么情況下會使得p,q指向同一個節點呢?根據上面我們的分析,只有p指向的節點在poll的時候轉變成了哨兵節點(通過updateHead方法中的h.lazySetNext)。
當線程A在判斷p==q時,線程B已經將執行完poll方法將p指向的節點轉換為哨兵節點并且head指向的節點已經發生了改變,所以就需要從restartFromHead處執行,保證用到的是最新的head。
poll->offer->poll
試想,還有這樣一種情況,如果當前隊列為空隊列,線程A進行poll操作,同時線程B執行offer,然后線程A在執行poll,那么此時線程A返回的是null還是線程B剛插入的最新的那個節點呢?我們來寫一代demo:
public?static?void?main(String[]?args)?{
????Thread?thread1?=?new?Thread(()?->?{
????????Integer?value?=?queue.poll();
????????System.out.println(Thread.currentThread().getName()?+?"?poll?的值為:"?+?value);
????????System.out.println("queue當前是否為空隊列:"?+?queue.isEmpty());
????});
????thread1.start();
????Thread?thread2?=?new?Thread(()?->?{
????????queue.offer(1);
????});
????thread2.start();
}輸出結果為:
Thread-0 poll 的值為:null queue當前是否為空隊列:false
通過debug控制線程thread1和線程thread2的執行順序,thread1先執行到第8行代碼if ((q = p.next) == null),由于此時隊列為空隊列if判斷為true,進入if塊,此時先讓thread1暫停,然后thread2進行offer插入值為1的節點后,thread2執行結束。再讓thread1執行,這時thread1并沒有進行重試,而是代碼繼續往下走,返回null,盡管此時隊列由于thread2已經插入了值為1的新的節點。所以輸出結果為thread0 poll的為null,然隊列不為空隊列。因此,在判斷隊列是否為空隊列的時候是不能通過線程在poll的時候返回為null進行判斷的,可以通過isEmpty方法進行判斷。
在分析offer方法的時候我們還留下了一個問題,即對offer方法中第11行代碼的理解。
offer->poll->offer
在offer方法的第11行代碼if (p == q),能夠讓if判斷為true的情況為p指向的節點為哨兵節點,而什么時候會構造哨兵節點呢?在對poll方法的討論中,我們已經找到了答案,即當head指向的節點的item域為null時會尋找真正的隊頭節點,等到待插入的節點插入之后,會更新head,并且將原來head指向的節點設置為哨兵節點。假設隊列初始狀態如下圖所示:
因此在線程A執行offer時,線程B執行poll就會存在如下一種情況:

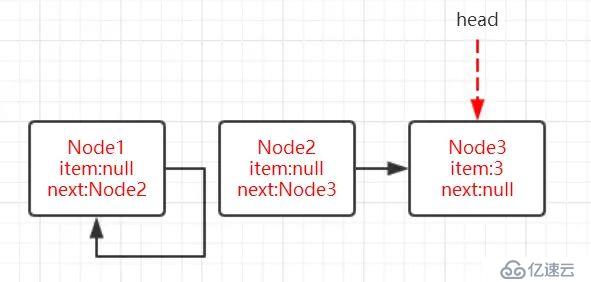
如圖,線程A的tail節點存在next節點Node1,因此會通過引用q往前尋找隊列真正的隊尾節點,當執行到判斷if (p == q)時,此時線程B執行poll操作,在對線程B來說,head和p指向Node0,由于Node0的item域為null,同樣會往前遞進找到隊列真正的隊頭節點Node1,在線程B執行完poll之后,Node0就會轉換為哨兵節點,也就意味著隊列的head發生了改變,此時隊列狀態為下圖。
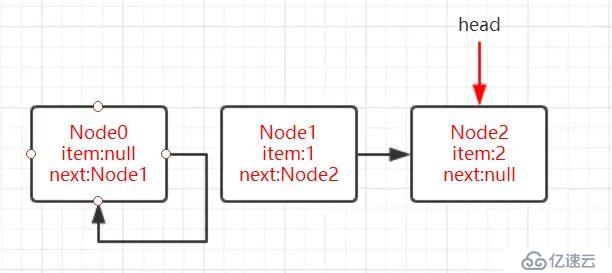
image.png
此時線程A在執行判斷if (p == q)時就為true,會繼續執行p = (t != (t = tail)) ? t : head;,由于tail指針沒有發生改變所以p被賦值為head,重新從head開始完成插入操作。
通過上面對offer和poll方法的分析,我們發現tail和head是延遲更新的,兩者更新觸發時機為:
tail更新觸發時機:當tail指向的節點的下一個節點不為null的時候,會執行定位隊列真正的隊尾節點的操作,找到隊尾節點后完成插入之后才會通過casTail進行tail更新;當tail指向的節點的下一個節點為null的時候,只插入節點不更新tail。
head更新觸發時機:當head指向的節點的item域為null的時候,會執行定位隊列真正的隊頭節點的操作,找到隊頭節點后完成刪除之后才會通過updateHead進行head更新;當head指向的節點的item域不為null的時候,只刪除節點不更新head。
并且在更新操作時,源碼中會有注釋為:hop two nodes at a time。所以這種延遲更新的策略就被叫做HOPS的大概原因是這個(猜的 :)),從上面更新時的狀態圖可以看出,head和tail的更新是“跳著的”即中間總是間隔了一個。那么這樣設計的意圖是什么呢?
如果讓tail永遠作為隊列的隊尾節點,實現的代碼量會更少,而且邏輯更易懂。但是,這樣做有一個缺點,**如果大量的入隊操作,每次都要執行CAS進行tail的更新,匯總起來對性能也會是大大的損耗。如果能減少CAS更新的操作,無疑可以大大提升入隊的操作效率,所以doug lea大師每間隔1次(tail和隊尾節點的距離為1)進行才利用CAS更新tail。
**對head的更新也是同樣的道理,雖然,這樣設計會多出在循環中定位隊尾節點,但總體來說讀的操作效率要遠遠高于寫的性能,因此,多出來的在循環中定位尾節點的操作的性能損耗相對而言是很小的。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





