溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
學GIS空間數據庫的時候,拓撲方面內容筆記
拓撲是研究幾何圖形或空間在連續改變形狀后還能保持不變的一些性質的一個學科。它只考慮物體間的位置關系而不考慮它們的形狀和大小。
“拓撲”就是把實體抽象成與其大小、形狀無關的“點”,而把連接實體的線路抽象成“線”,進而以圖的形式來表示這些點與線之間關系的方法,其目的在于研究這些點、線之間的相連關系。表示點和線之間關系的圖被稱為拓撲結構圖。拓撲結構與幾何結構屬于兩個不同的數學概念。在幾何結構中, 我們要考察的是點、線、面之間的位置關系,或者說幾何結構強調的是點與線所構成的形狀及大小。如梯形、正方形、平行四邊形及圓都屬于不同的幾何結構,但從拓撲結構的角度去看,由于點、線間的連接關系相同,從而具有相同的拓撲結構即環型結構。也就是說,不同的幾何結構可能具有相同的拓撲結構。?
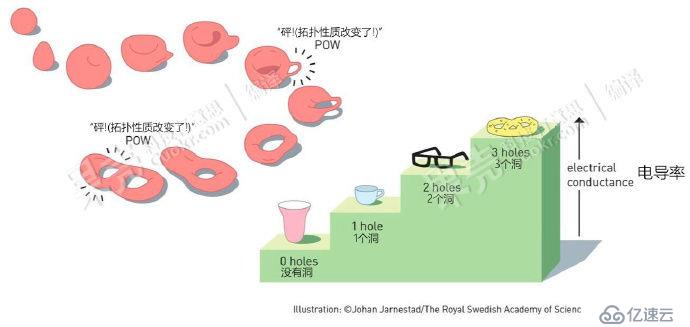
如三角形變成四邊形、原型、環形,角度、長度、面積、形狀等等都很可能發生變化。此時,不必考慮它們的形狀和大小(如長度、面積、形狀等等這些),只考慮物體間的位置、結構關系,只專注于在連續改變形狀后還能保持不變的一些性質(如他們都是一個圈),這就是拓撲學。

拓撲英文名是Topology,直譯是地志學,最早指研究地形、地貌相類似的有關學科。
幾何拓撲學是十九世紀形成的一門數學分支,它屬于幾何學的范疇。有關拓撲學的一些內容早在十八世紀就出現了。那時候發現的一些孤立的問題,在后來的拓撲學的形成中占著重要的地位。
1679年德國數學家萊布尼茨提出的名詞 拓撲學,起初叫形勢分析學,他在17世紀提出“位置的幾何學”(geometria situs)和“位相分析”(analysis situs)的說法。
1736年歐拉在解決了七橋問題,給當時數學界引起很多思考;
1750年歐拉在發表了多面體公式;
1833年高斯在電動力學中用線積分定義了空間中兩條封閉曲線的環繞數。
1847年 J.B.利斯廷根據希臘文τπο和λγο(“位置”和“研究”),提出Topology這一數學名詞,即拓撲學。Topology,直譯是地志學,最早指研究地形、地貌相類似的有關學科。
1851年左右,即19世紀中期,德國數學家黎曼在復變函數的研究中提出了黎曼面的幾何概念,并且強調為了研究函數、研究積分,就必須研究形勢分析學,從此數學界開始了現代拓撲學的系統研究。
?
?
不同學科對拓撲的定義不盡相同
集合拓撲:拓撲是集合上定義的一種結構。
點集拓撲學(Point Set Topology),有時也被稱為一般拓撲學(General Topology),是數學的拓撲學的一個分支。
它研究拓撲空間以及定義在其上的數學結構的基本性質。這一分支起源于以下幾個領域:對實數軸上點集的細致研究,流形的概念,度量空間的概念,以及早期的泛函分析。
拓撲是一個包含一個集合X連同和X的子集族Σ(稱為開集系)的二元組(X,Σ),它滿足如下三個公理:
開集的并集是開集。
有限個開集的交集是開集。
X和空集?是開集。
設T為非空集X的子集族。若T滿足以下條件:
X與空集都屬于T;
T中任意兩個成員的交屬于T;
T中任意多個成員的并屬于T; 則T稱為X上的一個拓撲。具有拓撲T的集合X稱為拓撲空間,記為(X,T)。
也等價于:
X和空集都屬于T;
T中任意多個成員的并集仍在T中;
T中有限多個成員的交集仍在T中。
此時稱稱T中的成員為這個拓撲空間的開集。最普通的例子便是實數集上的距離拓撲,這與我們通常對實數的認識相同。最簡單(粗)的拓撲為平凡拓撲,它只包含T本身和空集,最復雜(細)的拓撲的構成開集為T的所有子集。
同一個集合X,若指定不同的拓撲,則構造出不同的拓撲空間。凡屬于X的子集稱為X的一個關于T的開子集,即開集。開子集關于全集的補集,稱為閉子集,即閉集。一個集合是不是開/閉子集,取決于拓撲的指定。由定義,X本身和空集是既開又閉的子集。
本質上,拓撲就是要給一個集合指定一個幾何結構,然后這個集合就成了一個我們可以研究的空間。比如,有了拓撲和開集的定義后,我們就可以擺脫大一數學分析的ε-δ來給出更一般的連續性定義:設A和B是兩個拓撲空間,A到B的映射f稱為連續的,若任何B的開集在f下的原象是A的開集。這樣我們對于函數的研究將不再局限于實數,而是搬到更一般的拓撲空間內了。
?
?
?
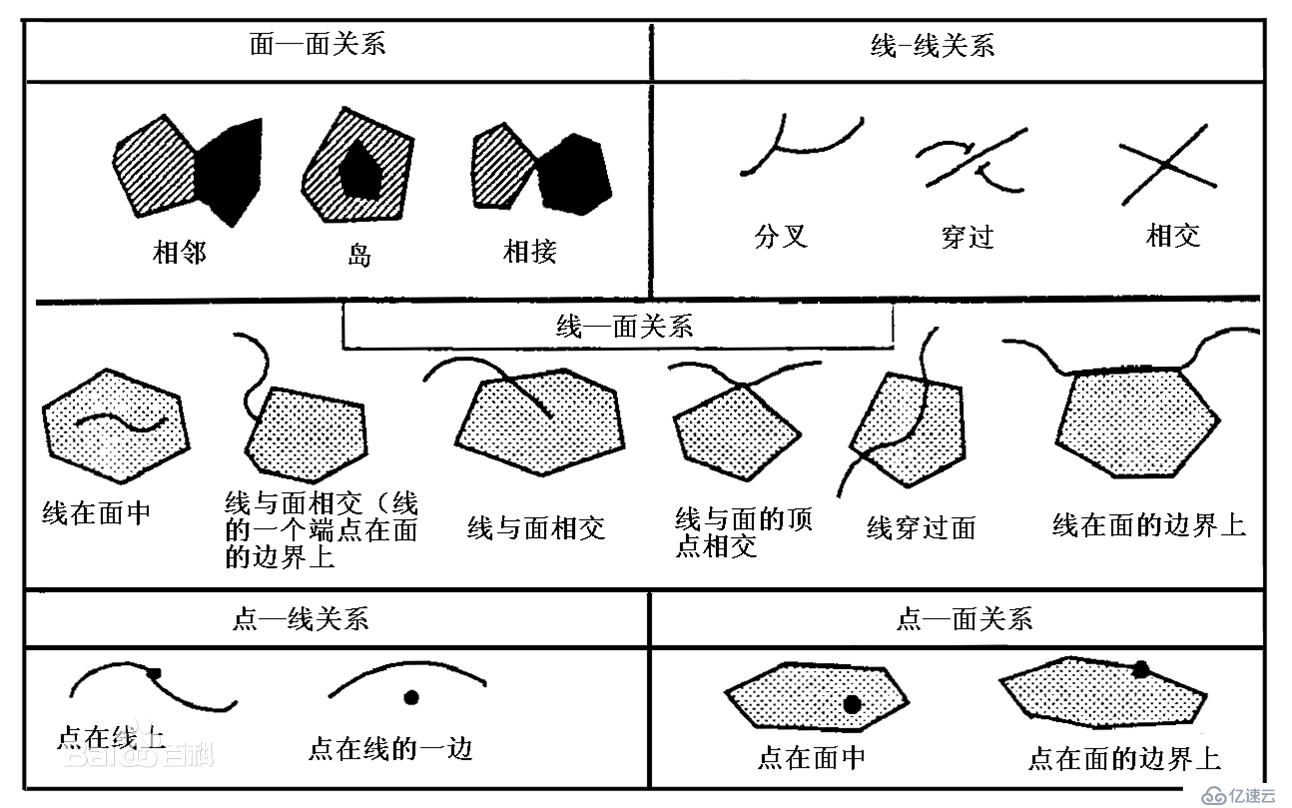
對于一般的拓撲關系,一圖概括如下
Egenhofer和Franzosa在1991年共同撰寫的論文Point-Set Topological Spatial Relations,為空間拓撲(九交模型)奠定了重要基礎。
依據集合論,作者對于點集拓撲空間定義了以下基本概念,以描述空間對象:
Interior(內部)? ?:對于?
?:對于? ?, interior指的是所有包含?
?, interior指的是所有包含? ?的開放集合的并集。對于空間對象,可以認為是空間對象的內部。
?的開放集合的并集。對于空間對象,可以認為是空間對象的內部。
Closure(閉包)? ?:對于??, closure指的是所有包含??的閉集合的交集。對于空間對象,可以認為是空間對象整體。
?:對于??, closure指的是所有包含??的閉集合的交集。對于空間對象,可以認為是空間對象整體。
Boundary(邊界)? ?:對于??, boundary指的是Y的閉包與Y的補集的閉包的交集,即?
?:對于??, boundary指的是Y的閉包與Y的補集的閉包的交集,即? ?。對于空間對象,可以認為是空間對象的邊界。
?。對于空間對象,可以認為是空間對象的邊界。
簡而言之,一個空間對象可定義為由內部+邊界構成。
根據以上三條定義可知以下兩命題:
 ?。即:內部和邊界的交集為空。
?。即:內部和邊界的交集為空。
 ?。即:內部和邊界的并集為整個對象。
?。即:內部和邊界的并集為整個對象。
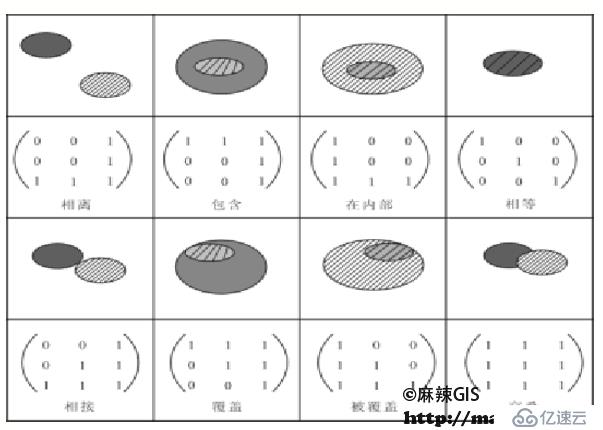
在一個平面R2上,兩個對象A和B之間的二元拓撲關系要基于以下的相交情況:A的內部(A°)、邊界(αA)和外部(A-)與B的內部(B°)、邊界(αB)和外部(B-)之間的交。
?
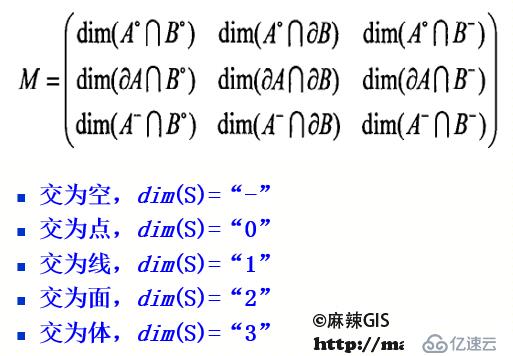
考慮取值有空(0)和非空(1),可以確定有256種二元拓撲關系。對于嵌在R2中的二維區域,有八個關系是可實現的,并且它們彼此互斥且完全覆蓋。這些關系為:相離(disjoint)、相接(meet)、交疊(overlap)、相等(equal)、包含(contain)、在內部(inside)、覆蓋(cover)和被覆蓋(covered by)。
九交模型
點-點空間關系2種:相離、相等;
點-線空間關系3種:相離、相接、包含于;
點-面空間關系3種:相離、相接、包含于;
點-體空間關系3種:相離、相接、包含于;
線-線空間關系7種:相離、相交、交疊、相等、相接、包含于、包含;
線-面空間關系5種:相離、相接、進入、穿越、包含于;
線-體空間關系5種:相離、相接、進入、穿越、包含于;
面-面空間關系10種:相離、相接、交疊、相等、包含于、包含、覆蓋、被覆蓋、穿越、被穿越;
面-體空間關系8種:相離、相接、交疊、進入、包含于、包含、穿越、被穿越;
體-體空間關系8種:相離、相接、進入、相等、包含于、包含、穿越、被穿越。
直線方程:
Ax+By+C=0
A=y1-y2,
B=x1-x2,
C=y2x1-y1x2
令S=Axi+Byi+C
當S<0 點在順時針方向上;
當S=0 點在直線上;
當S<0 點在逆指針方向上。
直線方程:
Ax+By+C=0
Ex+Fy+G=0
當FA-EB=0時,兩條直線的交點不存在;否則,交點坐標為:
xi=(GB-FC)/(FA-EB)
yi=(CE-AG)/(FA-EB)
?
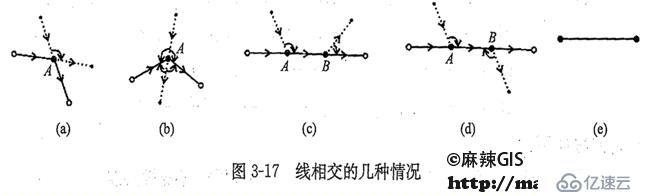
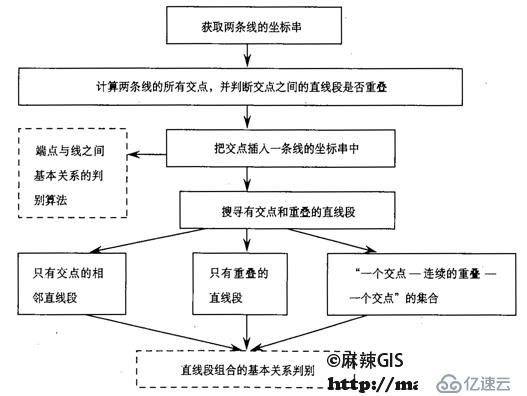
兩條線的直線段之間基本空間拓撲關系的推理
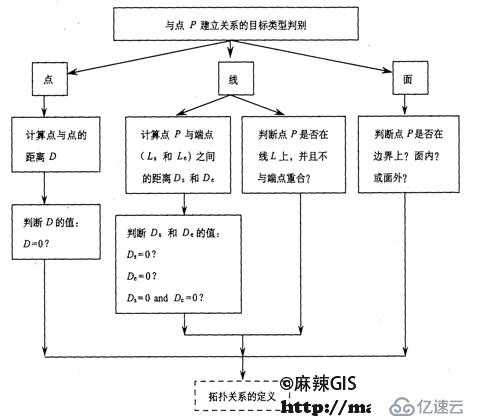
點與其他類型空間目標之間的拓撲關系決策樹
線與面之間的全域空間拓撲關系決策樹
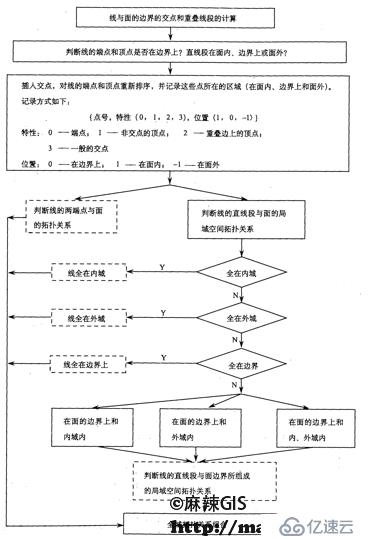
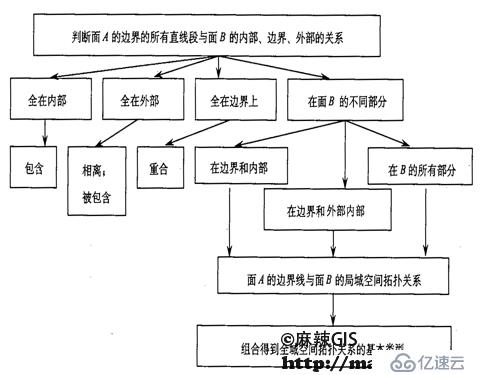
面與面之間的全域空間拓撲關系基本類型的決策樹
?
度量關系是在歐氏空間(Euclidean Space)(Blumenthal,1970)和度量空間(Metric Space)(Dhage,1992)上進行的操作,它是一切空間數據定量化的基礎。它包含長度、周長、面積、距離等定量的度量關系,其中最主要的度量空間關系是空間對象之間的距離關系。
歐幾里德距離定義如下(Kolountzakis and Kutulakos,1992):

曼哈頓距離是兩點在南北方向上的距離加在東西方向上的距離(Wu et al.,1987),即:
點與點之間距離&點與線之間距離:dPL(P,L)=min{d1,d2,…dn}
線與線之間的距離:d(L1,L2)=min{d(P1,P2)|P1∈L1,P2 ∈L2}
點與面之間的距離:
“中心距離”是點P與面A中幾何中心或者重心之間的距離,
“最小距離”是指點P與面A中所有點之間距離的最小值,
“最大距離”是指點P與面A中所有點之間距離的最大值。
面與面之間的距離
“中心距離”是指兩個面狀物體的質心之間的距離;
“最小距離”是指面A1中的點P1與A2中的點P2之間的距離的最小值;
“最大距離”是指面A1中的點P1與A2中的點P2之間的距離的最大值。
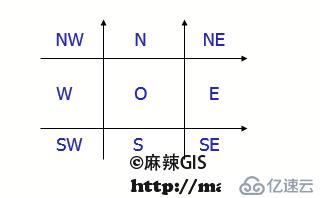
每區域賦予東、南、西和北,為得到更精確的方向關系可對其再進行細分得8或16方向。

?
該模型通過延伸目標的MBR的邊,將空間劃分為9個區域,分別表示為北、東北、東、東南、南、西南、西、西北和目標MBR所在的中心方向。
以直線段為參考的定性空間方向模型:以直線為空間參考目標,把二維空間分解為15個方向區域。

點A與點B的空間方向關系可以用向量AB與正北方向的夾角(順時針)來描述。
(a) 點A與點B之間的空間方向關系。
(b)點A與直線BC之間的空間方向關系,以角平分線L的方位表示。
(c) 用兩條直線的中點代表代表其方位。
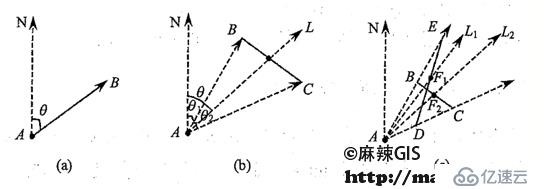
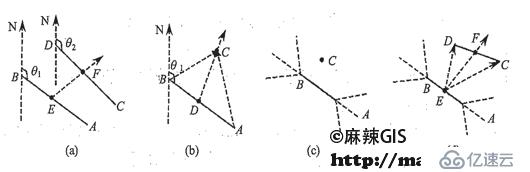
(a) 直線AB和直線CD的方向可用向量EF(E和F分別為兩直線的中點)來描述。
(b)直線AB和點C的方向關系。
(c) 劃分直線段AB的方向片,點C相對直線AB的關系可描述為點C在直線AB的哪個方向片中。
(d)直線AB和直線CD的方向可用向量EF(E和F分別為兩直線的中點)來描述,或用向量ED和向量EC來定義。
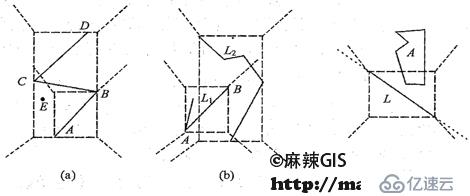
(a) 方向線PS和PE定義了點A與線L之間的全域空間方向關系,點A與P1、P2、P3(中點)的連線定義了點A與不同直線段的局域空間方向關系。
(b)方向線PS和PE重和,說明點A被線L包圍,這是全域空間方向關系,點A與P1、P2、P3、P4(中點)的連線定義了點A與不同直線段的局域空間方向關系。
(c)方向線PS和PE定義了點A與面B之間的全域空間方向關系,用方向線P1、P2把面域B分為3部分,每部分可以用該錐形的角平分線描述方向關系,這3部分的面積與面積B的總面積之比分別為B1、B2、B3。也可以用該錐形的每個角平分線在面內的長度與角平分線在面內的總長度之比L1、L2、L3來表示。
(d)方向線PS和PE重和,說明點A被面B包圍,這是全域空間方向關系,面域不同和點A之間的局域空間方向關系描述方法與(c)同。
(a) 線ABCD與點E之間的全域空間方向關系為“相同”,直線段AB與點E之間的局域空間方向關系為“西”。
(b) 反映線與線之間的全域空間方向關系,直線段AB與線L2的每條直線段和線的任意子集之間都有局域空間方向關系。
(c) 線與面的全域空間方向關系和局域空間方向關系均可象(b)一樣計算和描述。
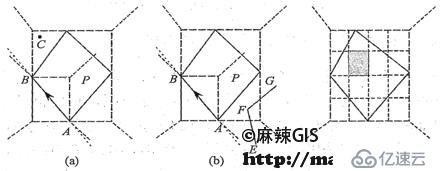
(a) 面P與點C之間的全域空間方向關系為“相同”,面P的直線AB與點C之間的局域空間方向關系為“北”。
(b) 面P與直線EFG之間的全域空間方向關系和局域空間方向關系如圖所示,前者為“東”、“相同”和“南”,而后者為“東”。
(c) 把區域柵格化,判斷子區域與源目標的全域空間方向關系和局域空間方向關系。
?
轉載本站文章《代數拓撲\集合拓撲\代數拓撲\拓撲關系\拓撲結構_筆記》, 請注明出處:https://www.zhoulujun.cn/html/theory/math/2019_0929_8164.html
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





