溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇“C++如何實現雙目立體匹配Census算法”文章的知識點大部分人都不太理解,所以小編給大家總結了以下內容,內容詳細,步驟清晰,具有一定的借鑒價值,希望大家閱讀完這篇文章能有所收獲,下面我們一起來看看這篇“C++如何實現雙目立體匹配Census算法”文章吧。
Census原理:
在視圖中選取任一點,以該點為中心劃出一個例如3 × 3 的矩形,矩形中除中心點之外的每一點都與中心點進行比較,灰度值小于中心點記為1,灰度大于中心點的則記為0,以所得長度為 8 的只有 0 和 1 的序列作為該中心點的 census 序列,即中心像素的灰度值被census 序列替換。經過census變換后的圖像使用漢明距離計算相似度,所謂圖像匹配就是在匹配圖像中找出與參考像素點相似度最高的點,而漢明距正是匹配圖像像素與參考像素相似度的度量。具體而言,對于欲求取視差的左右視圖,要比較兩個視圖中兩點的相似度,可將此兩點的census值逐位進行異或運算,然后計算結果為1 的個數,記為此兩點之間的漢明值,漢明值是兩點間相似度的一種體現,漢明值愈小,兩點相似度愈大實現算法時先異或再統計1的個數即可,漢明距越小即相似度越高。

下面的代碼是自己根據原理寫的,實現的結果并沒有很好,以后繼續優化代碼。
具體代碼如下:
//*************************Census*********************
#include <iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
using namespace std;
using namespace cv;
//-------------------定義漢明距離----------------------------
int disparity;
int GetHammingWeight(uchar value);//求1的個數
//-------------------定義Census處理圖像函數---------------------
int hWind = 1;//定義窗口大小為(2*hWind+1)
Mat ProcessImg(Mat &Img);//將矩形內的像素與中心像素相比較,將結果存于中心像素中
Mat Img_census, Left_census, Right_census;
//--------------------得到Disparity圖像------------------------
Mat getDisparity(Mat &left, Mat &right);
//--------------------處理Disparity圖像-----------------------
Mat ProcessDisparity(Mat &disImg);
int ImgHeight, ImgWidth;
//int num = 0;//異或得到的海明距離
Mat LeftImg, RightImg;
Mat DisparityImg(ImgHeight, ImgWidth, CV_8UC1, Scalar::all(0));
Mat DisparityImg_Processed(ImgHeight, ImgWidth, CV_8UC1, Scalar::all(0));
Mat DisparityImg_Processed_2(ImgHeight, ImgWidth, CV_8UC1);
//定義讀取圖片的路徑
string file_dir="C:\\Program Files\\FLIR Integrated Imaging Solutions\\Triclops Stereo Vision SDK\\stereomatching\\Grab_Stereo\\pictures\\";
//定義存儲圖片的路徑
string save_dir= "C:\\Program Files\\FLIR Integrated Imaging Solutions\\Triclops Stereo Vision SDK\\stereomatching\\Grab_Stereo\\Census\\";
int main()
{
LeftImg = imread(file_dir + "renwu_left.png", 0);
RightImg = imread(file_dir + "renwu_right.png", 0);
namedWindow("renwu_left", 1);
namedWindow("renwu_right", 1);
imshow("renwu_left", LeftImg);
waitKey(5);
imshow("renwu_right", RightImg);
waitKey(5);
ImgHeight = LeftImg.rows;
ImgWidth = LeftImg.cols;
Left_census= ProcessImg(LeftImg);//處理左圖,得到左圖的CENSUS圖像 Left_census
namedWindow("Left_census", 1);
imshow("Left_census", Left_census);
waitKey(5);
// imwrite(save_dir + "renwu_left.jpg", Left_census);
Right_census= ProcessImg(RightImg);
namedWindow("Right_census", 1);
imshow("Right_census", Right_census);
waitKey(5);
// imwrite(save_dir + "renwu_right.jpg", Right_census);
DisparityImg= getDisparity(Left_census, Right_census);
namedWindow("Disparity", 1);
imshow("Disparity", DisparityImg);
// imwrite(save_dir + "disparity.jpg", DisparityImg);
waitKey(5);
DisparityImg_Processed = ProcessDisparity(DisparityImg);
namedWindow("DisparityImg_Processed", 1);
imshow("DisparityImg_Processed", DisparityImg_Processed);
// imwrite(save_dir + "disparity_processed.jpg", DisparityImg_Processed);
waitKey(0);
return 0;
}
//-----------------------對圖像進行census編碼---------------
Mat ProcessImg(Mat &Img)
{
int64 start, end;
start = getTickCount();
Mat Img_census = Mat(Img.rows, Img.cols, CV_8UC1, Scalar::all(0));
uchar center = 0;
for (int i = 0; i < ImgHeight - hWind; i++)
{
for (int j = 0; j < ImgWidth - hWind; j++)
{
center = Img.at<uchar>(i + hWind, j + hWind);
uchar census = 0;
uchar neighbor = 0;
for (int p = i; p <= i + 2 * hWind; p++)//行
{
for (int q = j; q <= j + 2 * hWind; q++)//列
{
if (p >= 0 && p <ImgHeight && q >= 0 && q < ImgWidth)
{
if (!(p == i + hWind && q == j + hWind))
{
//--------- 將二進制數存在變量中-----
neighbor = Img.at<uchar>(p, q);
if (neighbor > center)
{
census = census * 2;//向左移一位,相當于在二進制后面增添0
}
else
{
census = census * 2 + 1;//向左移一位并加一,相當于在二進制后面增添1
}
//cout << "census = " << static_cast<int>(census) << endl;
}
}
}
}
Img_census.at<uchar>(i + hWind, j + hWind) = census;
}
}
/*end = getTickCount();
cout << "time is = " << end - start << " ms" << endl;*/
return Img_census;
}
//------------得到漢明距離---------------
int GetHammingWeight( uchar value)
{
int num = 0;
if (value == 0)
return 0;
while (value)
{
++num;
value = (value - 1)&value;
}
return num;
}
//--------------------得到視差圖像--------------
Mat getDisparity(Mat &left, Mat &right)
{
int DSR =16;//視差搜索范圍
Mat disparity(ImgHeight,ImgWidth,CV_8UC1);
cout << "ImgHeight = " << ImgHeight << " " << "ImgWidth = " << ImgWidth << endl;
for (int i = 0; i < ImgHeight; i++)
{
for (int j = 0; j < ImgWidth; j++)
{
uchar L;
uchar R;
uchar diff;
L = left.at<uchar>(i, j);
Mat Dif(1, DSR, CV_8UC1);
// Mat Dif(1, DSR, CV_32F);
for (int k = 0; k < DSR; k++)
{
//cout << "k = " << k << endl;
int y = j - k;
if (y < 0)
{
Dif.at<uchar>(k) = 0;
}
if (y >= 0)
{
R = right.at<uchar>(i,y);
//bitwise_xor(L, R, );
diff = L^R;
diff = GetHammingWeight(diff);
Dif.at<uchar>(k) = diff;
// Dif.at<float>(k) = diff;
}
}
//---------------尋找最佳匹配點--------------
Point minLoc;
minMaxLoc(Dif, NULL, NULL, &minLoc, NULL);
int loc = minLoc.x;
//cout << "loc..... = " << loc << endl;
disparity.at<uchar>(i,j)=loc*16;
}
}
return disparity;
}
//-------------對得到的視差圖進行處理-------------------
Mat ProcessDisparity(Mat &disImg)
{
Mat ProcessDisImg(ImgHeight,ImgWidth,CV_8UC1);//存儲處理后視差圖
for (int i = 0; i < ImgHeight; i++)
{
for (int j = 0; j < ImgWidth; j++)
{
uchar pixel = disImg.at<uchar>(i, j);
if (pixel < 100)
pixel = 0;
ProcessDisImg.at<uchar>(i, j) = pixel;
}
}
return ProcessDisImg;
}
經過處理后的左圖census圖像
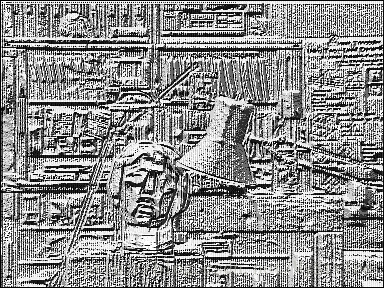
經過處理后的右圖census圖像
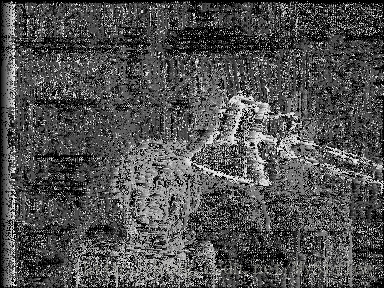
disparity圖像

處理后的disparity圖像
以上就是關于“C++如何實現雙目立體匹配Census算法”這篇文章的內容,相信大家都有了一定的了解,希望小編分享的內容對大家有幫助,若想了解更多相關的知識內容,請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





