溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要講解了“FreeRTOS系統延時實例分析”,文中的講解內容簡單清晰,易于學習與理解,下面請大家跟著小編的思路慢慢深入,一起來研究和學習“FreeRTOS系統延時實例分析”吧!
FreeRTOS提供了兩個系統延時函數:相對延時函數vTaskDelay()和絕對延時函數
vTaskDelayUntil()。相對延時是指每次延時都是從任務執行函數vTaskDelay()開始,延時指定的時間結束;
絕對延時是指每隔指定的時間,執行一次調用vTaskDelayUntil()函數的任務。換句話說:任務以固定的頻率執行。
考慮下面的任務,任務A在執行任務主體代碼后,調用相對延時函數vTaskDelay()進入阻塞狀態。系統中除了任務A外,還有其它任務,但是任務A的優先級最高。
void vTaskA( void * pvParameters )
{
/* 阻塞500ms. 注:宏pdMS_TO_TICKS用于將毫秒轉成節拍數,FreeRTOS V8.1.0及
以上版本才有這個宏,如果使用低版本,可以使用 500 / portTICK_RATE_MS */
const portTickType xDelay = pdMS_TO_TICKS(500);
for( ;; )
{
// ...
// 這里為任務主體代碼
// ...
/* 調用系統延時函數,阻塞500ms */
vTaskDelay( xDelay );
}
}對于這樣一個任務,執行過程如圖1-1所示。當任務A獲取CPU使用權后,先執行任務A的主體代碼,之后調用系統延時函數vTaskDelay()進入阻塞狀態。任務A進入阻塞后,其它任務得以執行。
FreeRTOS內核會周期性的檢查任務A的阻塞是否達到,如果阻塞時間達到,則將任務A設置為就緒狀態。由于任務A的優先級最高,會搶占CPU,再次執行任務主體代碼,不斷循環。
從圖1-1可以看出,任務A每次延時都是從調用延時函數vTaskDelay()開始算起的,延時是相對于這一時刻開始的,所以叫做相對延時函數。
從圖1-1還可以看出,如果執行任務A的過程中發生中斷,那么任務A執行的周期就會變長,所以使用相對延時函數vTaskDelay(),不能周期性的執行任務A。
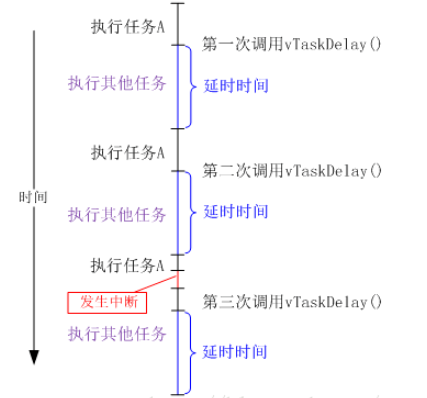
圖1-1:相對延時函數執行示意圖
我們來看一下源碼。
void vTaskDelay( const TickType_t xTicksToDelay )
{
BaseType_t xAlreadyYielded = pdFALSE;
/* 如果延時時間為0,則不會將當前任務加入延時列表 */
if( xTicksToDelay > ( TickType_t ) 0U )
{
vTaskSuspendAll();
{
/* 將當前任務從就緒列表中移除,并根據當前系統節拍計數器值計算喚醒時間,然后將任務加入延時列表 */
prvAddCurrentTaskToDelayedList( xTicksToDelay, pdFALSE );
}
xAlreadyYielded = xTaskResumeAll();
}
/* 強制執行一次上下文切換*/
if( xAlreadyYielded == pdFALSE )
{
portYIELD_WITHIN_API();
}
}如果延時大于0,則會將當前任務從就緒列表刪除,然后加入到延時列表。是調用函數prvAddCurrentTaskToDelayedList()完成這一過程的。我們在前面一系列博文中多次提到,tasks.c中定義了很多局部靜態變量,其中有一個變量xTickCount定義如下所示:
static volatile TickType_t xTickCount = ( TickType_t ) 0U;
這個變量用來計數,記錄系統節拍中斷的次數,它在啟動調度器時被清零,在每次系統節拍時鐘發生中斷后加1。相對延時函數會使用到這個變量,xTickCount表示了當前的系統節拍中斷次數,這個值加上參數規定的延時時間(以系統節拍數表示)xTicksToDelay,就是下次喚醒任務的時間,xTickCount+ xTicksToDelay會被記錄到任務TCB中,隨著任務一起被掛接到延時列表。
我們知道變量xTickCount是TickType_t類型的,它也會溢出。在32位架構中,當xTicksToDelay達到4294967295后再增加,就會溢出變成0。為了解決xTickCount溢出問題,FreeRTOS使用了兩個延時列表:xDelayedTaskList1和xDelayedTaskList2,并使用兩個列表指針類型變量pxDelayedTaskList和pxOverflowDelayedTaskList分別指向上面的延時列表1和延時列表2(在創建任務時將延時列表指針指向延時列表)。順便說一下,上面的兩個延時列表指針變量和兩個延時列表變量都是在tasks.c中定義的靜態局部變量。
如果內核判斷出xTickCount+ xTicksToDelay溢出,就將當前任務掛接到列表指針pxOverflowDelayedTaskList指向的列表中,否則就掛接到列表指針pxDelayedTaskList指向的列表中。
每次系統節拍時鐘中斷,中斷服務函數都會檢查這兩個延時列表,查看延時的任務是否到期,如果時間到期,則將任務從延時列表中刪除,重新加入就緒列表。如果新加入就緒列表的任務優先級大于當前任務,則會觸發一次上下文切換。
考慮下面的任務,任務B首先調用絕對延時函數vTaskDelayUntil ()進入阻塞狀態,阻塞時間到達后,執行任務主體代碼。系統中除了任務B外,還有其它任務,但是任務B的優先級最高。
void vTaskB( void * pvParameters )
{
static portTickType xLastWakeTime;
const portTickType xFrequency = pdMS_TO_TICKS(500);
// 使用當前時間初始化變量xLastWakeTime ,注意這和vTaskDelay()函數不同
xLastWakeTime = xTaskGetTickCount();
for( ;; )
{
/* 調用系統延時函數,周期性阻塞500ms */
vTaskDelayUntil( &xLastWakeTime,xFrequency );
// ...
// 這里為任務主體代碼,周期性執行.注意這和vTaskDelay()函數也不同
// ...
}
}對于這樣一個任務,執行過程如圖2-1所示。當任務B獲取CPU使用權后,先調用系統延時函數vTaskDelayUntil()使任務進入阻塞狀態。任務B進入阻塞后,其它任務得以執行。FreeRTOS內核會周期性的檢查任務A的阻塞是否達到,如果阻塞時間達到,則將任務A設置為就緒狀態。
由于任務B的優先級最高,會搶占CPU,接下來執行任務主體代碼。任務主體代碼執行完畢后,會繼續調用系統延時函數vTaskDelayUntil()使任務進入阻塞狀態,周而復始。
從圖2-1可以看出,從調用函數vTaskDelayUntil()開始,每隔固定+
-周期,任務B的主體代碼就會被執行一次,即使任務B在執行過程中發生中斷,也不會影響這個周期性,只是會縮短其它任務的執行時間!所以這個函數被稱為絕對延時函數,它可以用于周期性的執行任務A的主體代碼。
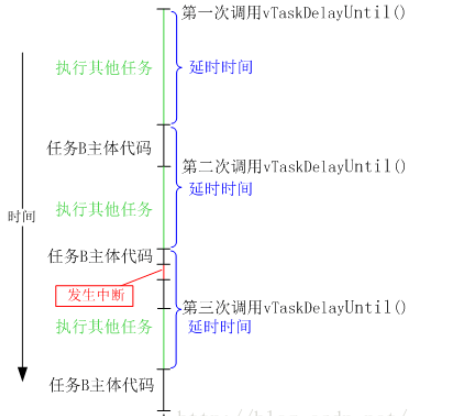
圖2-1:絕對延時函數執行示意圖
函數vTaskDelayUntil()是如何做到周期性的呢,我們來看一下源碼。
void vTaskDelayUntil( TickType_t * const pxPreviousWakeTime, const TickType_t xTimeIncrement )
{
TickType_t xTimeToWake;
BaseType_t xAlreadyYielded, xShouldDelay = pdFALSE;
vTaskSuspendAll();
{
/* 保存系統節拍中斷次數計數器 */
const TickType_t xConstTickCount = xTickCount;
/* 計算任務下次喚醒時間(以系統節拍中斷次數表示) */
xTimeToWake = *pxPreviousWakeTime + xTimeIncrement;
/* *pxPreviousWakeTime中保存的是上次喚醒時間,喚醒后需要一定時間執行任務主體代碼,如果上次喚醒時間大于當前時間,說明節拍計數器溢出了 */
if( xConstTickCount < *pxPreviousWakeTime )
{
/*只有當周期性延時時間大于任務主體代碼執行時間,才會將任務掛接到延時列表.*/
if( ( xTimeToWake < *pxPreviousWakeTime ) && ( xTimeToWake > xConstTickCount ) )
{
xShouldDelay = pdTRUE;
}
}
else
{
/* 也都是保證周期性延時時間大于任務主體代碼執行時間 */
if( ( xTimeToWake < *pxPreviousWakeTime ) || ( xTimeToWake > xConstTickCount ) )
{
xShouldDelay = pdTRUE;
}
}
/* 更新喚醒時間,為下一次調用本函數做準備. */
*pxPreviousWakeTime = xTimeToWake;
if( xShouldDelay != pdFALSE )
{
/* 將本任務加入延時列表,注意阻塞時間并不是以當前時間為參考,因此減去了當前系統節拍中斷計數器值*/
prvAddCurrentTaskToDelayedList( xTimeToWake - xConstTickCount, pdFALSE );
}
}
xAlreadyYielded = xTaskResumeAll();
/* 強制執行一次上下文切換 */
if( xAlreadyYielded == pdFALSE )
{
portYIELD_WITHIN_API();
}
}與相對延時函數vTaskDelay不同,本函數增加了一個參數pxPreviousWakeTime用于指向一個變量,變量保存上次任務解除阻塞的時間。這個變量在任務開始時必須被設置成當前系統節拍中斷次數(見上文的任務B舉例),此后函數vTaskDelayUntil()在內部自動更新這個變量。
由于變量xTickCount可能會溢出,所以程序必須檢測各種溢出情況,并且要保證延時周期不得小于任務主體代碼執行時間。這很好理解,不可能出現每5毫秒執行一個需要20毫秒才能執行完的任務。
如果我們以橫坐標表示變量xTickCount的范圍,則橫坐標左端為0,右端為變量xTickCount所能表示的最大值。在如圖2-2所示的三種情況下,才可以將任務加入延時列表。
圖2-2中
*pxPreviousWakeTime和xTimeToWake之間表示任務周期性延時時間,
*pxPreviousWakeTime和xConstTickCount之間表示任務B主體代碼執行時間。
圖2-2中
第一種情況處理系統節拍中斷計數器(xConstTickCount)和喚醒時間計數器(xTimeToWake)溢出情況;
第二種情況處理喚醒時間計數器(xTimeToWake)溢出情況
第三種情況處理常規無溢出的情況。
從圖中可以看出,不管是溢出還是無溢出,都要求在下次喚醒任務之前,當前任務主體代碼必須被執行完。表現在圖2-2中,就是變量xTimeToWake總是大于變量xConstTickCount(每溢出一次的話相當于加上一次最大值Max)。

圖2-2:將任務加入延時列表的三種情況
計算的喚醒時間合法后,就將當前任務加入延時列表,同樣延時列表也有兩個。每次系統節拍中斷,中斷服務函數都會檢查這兩個延時列表,查看延時的任務是否到期,如果時間到期,則將任務從延時列表中刪除,重新加入就緒列表。如果新加入就緒列表的任務優先級大于當前任務,則會觸發一次上下文切換。
感謝各位的閱讀,以上就是“FreeRTOS系統延時實例分析”的內容了,經過本文的學習后,相信大家對FreeRTOS系統延時實例分析這一問題有了更深刻的體會,具體使用情況還需要大家實踐驗證。這里是億速云,小編將為大家推送更多相關知識點的文章,歡迎關注!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





