溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
本篇文章給大家分享的是有關怎樣深度學習中的檢測網絡SSD/Faster R-CNN/YOLO,小編覺得挺實用的,因此分享給大家學習,希望大家閱讀完這篇文章后可以有所收獲,話不多說,跟著小編一起來看看吧。
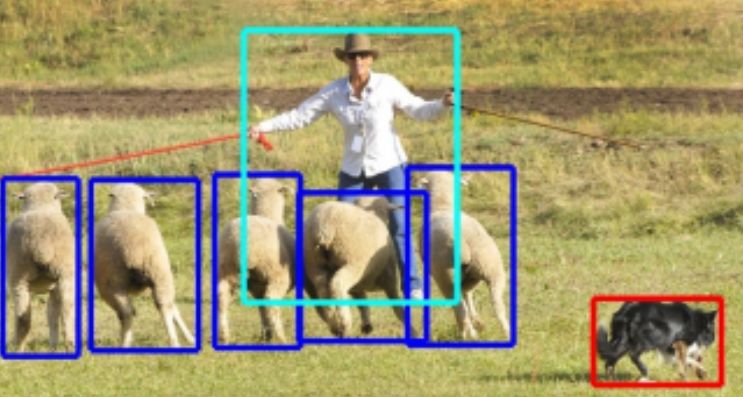
深度學習中的檢測任務(Detection)是指檢測出圖片中的物體位置,一般需要進行畫框。比如下圖中把人、羊,還有狗都框出來了,具體來說,網絡需要輸出框的坐標。
檢測網絡有哪些?
常用的檢測可以大致可以分為兩類:two stage和one stage. Two stage是說在檢測網絡分兩步,第一步是框出物體,第二步是確定這個物體的分類。One stage就是根據提取的特征,直接使用回歸網絡得出其分類和檢測框。其中,Faster R-CNN屬于two stage,SSD和YOLO屬于one stage.
One stage的好處是快,Two stage的好處是準確,在得到檢測框后,再去分類這個任務要比直接回歸網絡得到分類好容易很多。
下圖是Faster RCNN的結構:
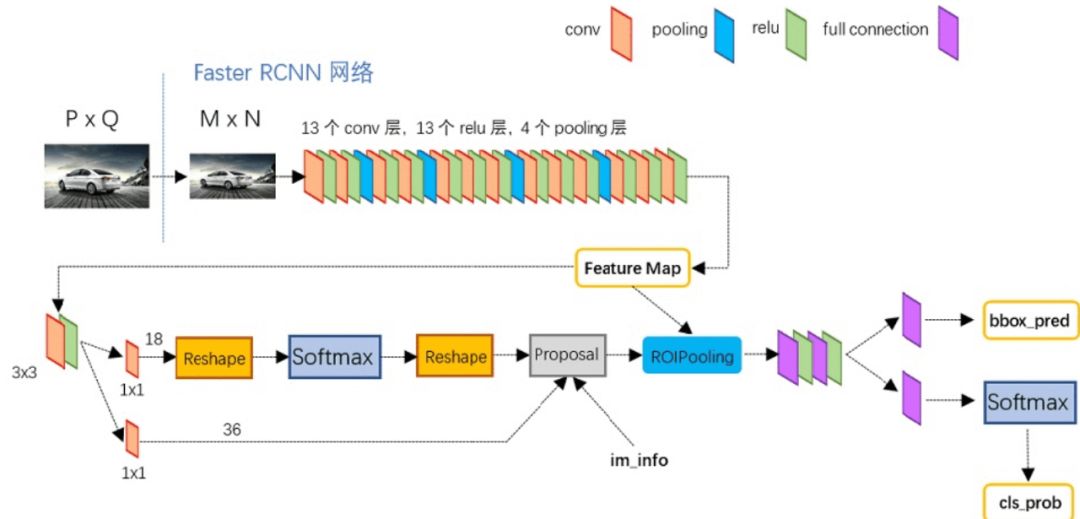
主要分為四個步驟:
- 卷積層。原始圖片先經過conv-relu-pooling的多層卷積神經網絡,提取出特征圖(feature map)。
- RPN層,region proposal networks。RPN層用于生成候選框,并利用softmax判斷候選框是前景還是背景,從中選取前景候選框(因為物體一般在前景中),并回歸調整候選框的位置,獲得框內的物體的feature map
- ROI層,它將大小尺寸不同物體的feature map池化成相同的大小,然后送入后續的全連接層進行物體分類
- 分類層。利用ROI層輸出的特征圖進行分類,同時再次對檢測框bounding box進行回歸從而得到更精確的形狀和位置。
SSD和YOLO可以放在一起對比,因為都是屬于one stage的網絡,在獲取feature map后,檢測和分類一起在一起進行。SSD和YOLO的區別在于SSD能夠進行多尺度特征提取,可以看到上面的SSD結構有6個箭頭指向Detections,每一個箭頭代表一個尺度的feature map,卷積層越往后越能看到全局的特征。YOLO則沒有這方面的設計,只有一個特征輸出到Detections網絡中。
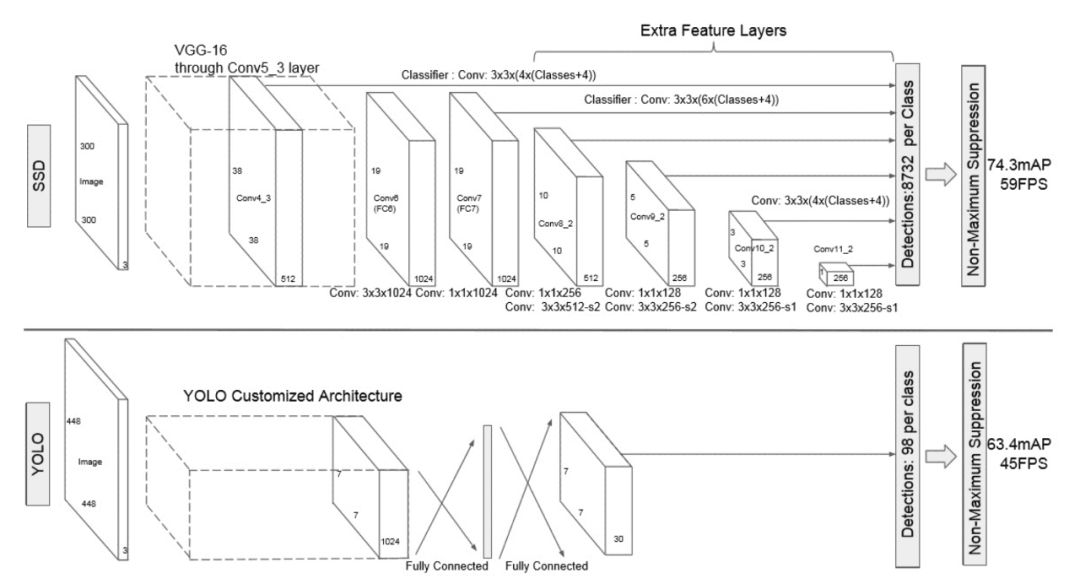
因為SSD網絡的這種設計,檢測精度比YOLO高,同時速度比Faster RCNN快,因此也是當前應用最廣泛的檢測網絡之一。另外,在SSD原始論文中用到的是VGG骨架來提取特征,現在很多更好的特征提取網絡,例如ResNet,mobilenet也在大量應用,進一步提高精度或者加快速度。
以上就是怎樣深度學習中的檢測網絡SSD/Faster R-CNN/YOLO,小編相信有部分知識點可能是我們日常工作會見到或用到的。希望你能通過這篇文章學到更多知識。更多詳情敬請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





