溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
今天就跟大家聊聊有關OpenVINO如何實現Robomaster自瞄,可能很多人都不太了解,為了讓大家更加了解,小編給大家總結了以下內容,希望大家根據這篇文章可以有所收獲。
在Robomaster比賽中,選手往往使用顏色分離,提取輪廓,匹配輪廓的方式來識別裝甲板,但往往會花費大量時間在現場調整參數,于是我們想:能否利用深度學習來做自瞄以提高其魯棒性?但深度學習算法在實時性上通常表現不好,在1080ti這樣的顯卡才能達到實時,但沒人會在機器人上帶一個煤氣灶吧。很多人會想到使用Tensor RT,或者模型剪枝/壓縮,低比特推理的方式提高深度學習算法在GPU上的速度,但沒有想到使用純CPU也能實時運行神經網絡。憑借Intel團隊發布的openvino,我們可以在Intel CPU或者計算棒上實時運行目標檢測算法。在這里我們以CPU+計算棒的方式介紹完整的實現步驟。How it works?分為三個步驟
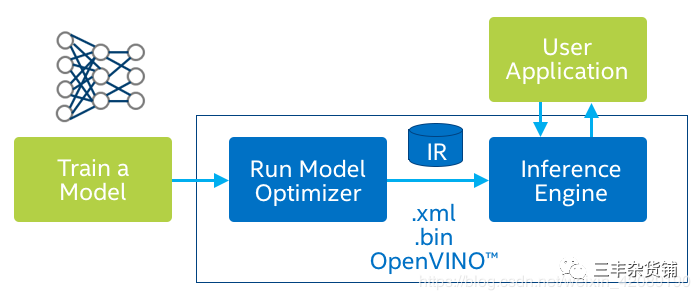 根據官網上的信息,openvino對TensorFlow支持的最好,所以我們這里以谷歌的模型庫為示例,走通上述的pipeline。
根據官網上的信息,openvino對TensorFlow支持的最好,所以我們這里以谷歌的模型庫為示例,走通上述的pipeline。
本節以robomaster數據集為例,利用TensorFlow Object Detection API訓練自己的模型。
鏈接:https://github.com/tensorflow/models/tree/master/research/object_detection
TensorFlow Object Detection API是谷歌爸爸開源的模型庫,包含了完整的訓練和評測代碼。
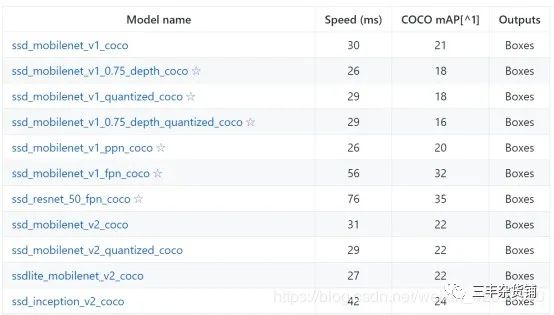
模型包括主流的檢測和分割網絡,有SSD,Faster rcnn,mask rcnn,主干網包括mobilenet v1/v2/v3(看出谷歌爸爸的偏心了吧),inception v2,resnet 50/101。
大疆在2020年初開源了一個俯視視角的數據集,具體特征類似于大家看直播時的畫面。分辨率是1920*1080。官方的用意應該是給雷達站做目標檢測,放在自瞄這樣的平視場景會存在一定的gap,同時分辨率也過大,增大計算負擔。所以我們在官方數據集的基礎上進行了魔改,改動如下:


下載鏈接:https://pan.baidu.com/s/105vjTcDs6XZHtnXAgCx86g 提取碼:v8yg
Prerequisite:顯卡:最好1080ti以上。單卡v100兩個小時訓練完畢。
pip install tensorflow-gpu==1.14 最好使用1.14版本的TF
Linux系統
請參考 官方安裝指令:https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/installation.md
python object_detection/dataset_tools/create_coco_tf_record.py --logtostderr \
--train_image_dir="data/roco_train" \
--val_image_dir="data/roco_val" \
--test_image_dir="data/roco_val" \
--train_annotations_file="data/train.json" \
--val_annotations_file="data/val.json" \
--testdev_annotations_file="data/val.json" \
--output_dir="models/research/save_dir"
目錄根據自己的實際位置更改,其中test可以忽略
所有模型配置文件在models/research/object_detection/samples/configs目錄下,以ssd_mobilenet_v2_coco.config為例。
需要修改的地方①num_classes: 2 ②image_resizer:height: 300 width: 400 ③fine_tune_checkpoint ④最后的數據位置 數據擴充:水平翻轉,亮度,對比度,飽和度隨機抖動
data_augmentation_options {
random_horizontal_flip {
}
}
data_augmentation_options {
random_adjust_brightness {
max_delta: 0.2
}
}
data_augmentation_options {
random_adjust_contrast {
min_delta: 0.7
max_delta: 1.1
}
}
data_augmentation_options {
random_adjust_saturation {
min_delta: 0.9
max_delta: 1.1
}
}
在models/research/object_detection/data/*.pbtxt里記錄了數據集的類別,這里我們是兩類,所以將label_map_path中的文件替換為以下字段:(注意文件名對應)
item {
name: "/m/01g317"
id: 1
display_name: "armor_blue"
}
item {
name: "/m/0199g"
id: 2
display_name: "armor_red"
}
訓練代碼
export PYTHONPATH=$PYTHONPATH:`pwd`:`pwd`/slim
CUDA_VISIBLE_DEVICES=0 python object_detection/model_main.py \
--pipeline_config_path=object_detection/samples/configs/ssd_mobilenet_v2_coco.config \
--model_dir='output_model' \
--num_train_steps=500000 \
--sample_1_of_n_eval_examples=10 \
--alsologtostderr
v100訓練2個小時就收斂了,1080ti可能三小時。訓練過程中會邊訓練邊評測。
這里我們關注的是mAP(0.5:0.95)和AP(0.5),可以看到mAP是0.537,AP是0.974,基本滿足需求。
Average Precision (AP) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.537
Average Precision (AP) @[ IoU=0.50 | area= all | maxDets=100 ] = 0.974
Average Precision (AP) @[ IoU=0.75 | area= all | maxDets=100 ] = 0.531
Average Precision (AP) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.529
Average Precision (AP) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.613
Average Precision (AP) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = -1.000 Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 1 ] = 0.220
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets= 10 ] = 0.618
Average Recall (AR) @[ IoU=0.50:0.95 | area= all | maxDets=100 ] = 0.619
Average Recall (AR) @[ IoU=0.50:0.95 | area= small | maxDets=100 ] = 0.607
Average Recall (AR) @[ IoU=0.50:0.95 | area=medium | maxDets=100 ] = 0.684
Average Recall (AR) @[ IoU=0.50:0.95 | area= large | maxDets=100 ] = -1.000
當然,我們也放出來了模型文件
下載鏈接:百度云:https://pan.baidu.com/s/1-m1ovofM_X9rh5rlQEicFg 提取碼:4nra
在Linux下的安裝請參閱 官方文檔(很簡單):https://docs.openvinotoolkit.org/latest/_docs_install_guides_installing_openvino_linux.html
同時還可以查看 b站視頻:https://www.bilibili.com/video/BV1fC4y1s7dt
仍然在TensorFlow models文件夾下,先提取inference_graph
python object_detection/export_inference_graph.py \
--input_type=image_tensor \
--pipeline_config_path=object_detection/samples/configs/ssdlite_mobilenet_v2_coco.config \ --trained_checkpoint_prefix=models/research/output_model/model.ckpt-18723 \--output_directory=models/research/exported_model
將inference_graph轉換為openvino接受的格式也就是intermediate representation。這里需要注意ssd mobilenetv2對應的是ssd_support_api_v1.15.json
python3 mo_tf.py --input_model=exported_model/frozen_inference_graph.pb --transformations_config /opt/intel/openvino/deployment_tools/model_optimizer/extensions/front/tf/ssd_support_api_v1.15.json --tensorflow_object_detection_api_pipeline_config exported_model/pipeline.config --reverse_input_channels
Python測試模型
python3 object_detection_demo_ssd_async.py -m /home/lilelife/onnx/ssdv2/frozen_inference_graph.xml -i *.avi
C艸測試模型(記得先編譯源碼)
./object_detection_demo_ssd_async -i *.mp4 -m ssdv2/frozen_inference_graph.xml
結果就是開頭的GIF啦。
看完上述內容,你們對OpenVINO如何實現Robomaster自瞄有進一步的了解嗎?如果還想了解更多知識或者相關內容,請關注億速云行業資訊頻道,感謝大家的支持。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





