溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇“python開發板驅動舵機的方法是什么”文章的知識點大部分人都不太理解,所以小編給大家總結了以下內容,內容詳細,步驟清晰,具有一定的借鑒價值,希望大家閱讀完這篇文章能有所收獲,下面我們一起來看看這篇“python開發板驅動舵機的方法是什么”文章吧。
舵機主要有以下3個優點:
一是體積緊湊,便于安裝; 二是輸出力矩大,穩定性好; 三是控制簡單,便于和數字系統接口。
本次教程中使用的是SG90的舵機,個人感覺性能一般,但是比較穩定和耐用,做DIY實驗器材用還是比較不錯的。
舵機的基本介紹
舵機,又稱伺服馬達,是一種具有閉環控制系統的機電結構。舵機主要是由外殼、電路板、無核心馬達、齒輪與位置檢測器所構成。 其工作原理是由控制器發出PWM(脈沖寬度調制)信號給舵機,經電路板上的IC處理后計算出轉動方向,再驅動無核心馬達轉動, 透過減速齒輪將動力傳至擺臂,同時由位置檢測器(電位器)返回位置信號,判斷是否已經到達設定位置,一般舵機只能旋轉180度。(蘿卜教育學科編程tpyboard。com)
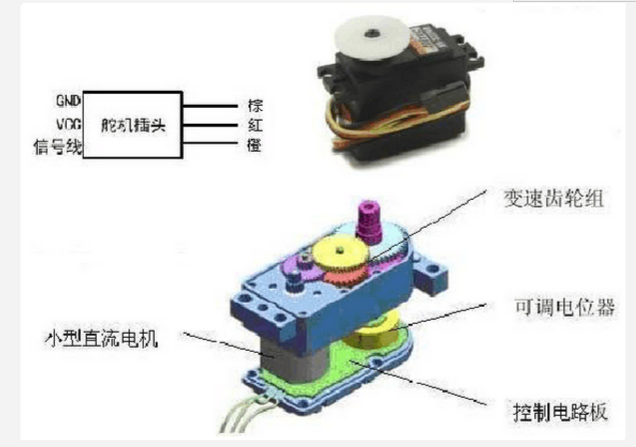
舵機的接線
舵機有3根線,棕色為地,紅色為電源正,橙色為信號線,但不同牌子的舵機,線的顏色可能不同。
舵機的控制原理
舵機的轉動的角度是通過調節PWM(脈沖寬度調制)信號的占空比來實現的。
占空比
1.指高電平在一個周期之內所占的時間比率。
2.正脈沖的持續時間與脈沖總周期的比值。例如:正脈沖寬度1μs,信號周期10μs的脈沖序列占空比為0.1。即:脈沖的寬度除以脈沖的周期稱為占空比。標準PWM(脈沖寬度調制)信號的周期固定為20ms(50Hz),理論上脈寬分布應在1ms到2ms之間,但是,事實上脈寬可由0.5ms到2.5ms之間,脈寬和舵機的轉角0°~180°相對應。(蘿卜教育學科編程tpyboard。com)
Python語言驅動舵機的方法
其實說了以上這些呢,都是為了給大家介紹利用Python語言來控制舵機的轉動角度,和普通單片機一樣的,都是需要用不同寬度的脈沖來控制器轉動的角度。 說白了,我們需要做的就是使用Python語言來輸出不同寬度的脈沖信號,來給到信號線里面去。現在一般的舵機脈寬那都是在0.5ms到2.5ms之間,這就可以計算了。 0.5MS-2.5MS這兩毫秒里面可以控制轉動到180度,這樣算下來,轉一度的脈沖時間大約就是2毫秒/180度=0.011毫秒/度,這樣依次計算就可以了。剩下的就是寫一個脈沖信號了,相信寫脈沖信號的程序大家都很熟悉啦。 但是,在舵機里面有一些幾點幾的毫秒的延時脈沖,這個在Python語言里如果想要利用delay()函數來做延時的話,很難做到每個角度都可以轉到,甚至說是很難做到轉動到大多數的角度。所以,你需要找到一個比毫秒延時還要精確的延時函數來作為脈沖的計時延時函數。我現在用的是time.sleep(i)這個函數,這個函數里面的i,建議設置在0.0000-0.0035之間。不能說精確的轉動到每個角度吧,但是百分之九十的角度都是可以轉到。如果想讓舵機進行循環擺動,一定要記得加上適當的延時,因為程序可以飛快的跑,但是舵機轉動也是需要一點時間的。舵機轉動時間肯定要比程序跑一遍的時間要長的多啦。(蘿卜教育學科編程tpyboard。com)
實驗目的
通過加速度傳感器的X方向控制舵機的轉動,讓舵機隨TPYBoard 的轉動而轉動
實驗材料
TPYBoard v10x 開發板 1塊
SG90舵機 1個
杜邦線 若干
實驗線路圖
這里電路圖很簡單,只需要給舵機接上VCC和GNG(這是最基本的,這個開發板上好多電源和地可以用)。 然后把舵機的信號線接到任意一個GPIO口(后面程序里面要在這個GPIO往外輸出脈沖的,我用了X1,還有很多其他的GPIO口可以用。)就可以了。 接線原理圖:
import pyb
import time
from pyb import Pin
xlights = (pyb.LED(2), pyb.LED(3))
ylights = (pyb.LED(1), pyb.LED(4))
M0 = Pin('X1', Pin.OUT_PP)
accel = pyb.Accel()
i=0.0001
j=0.0000
while True:
x = accel.x()
print("x=")
print(x)
Y=x+20
M0.high()
time.sleep(i*Y)
M0.low()
time.sleep(i*Y)
pyb.delay(12)
if x > 0:
xlights[0].on()
xlights[1].off()
elif x < 0:
xlights[1].on()
xlights[0].off()
else:
xlights[0].off()
xlights[1].off()以上就是關于“python開發板驅動舵機的方法是什么”這篇文章的內容,相信大家都有了一定的了解,希望小編分享的內容對大家有幫助,若想了解更多相關的知識內容,請關注億速云行業資訊頻道。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





