溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
SylixOS中怎么實現EEPROM設備驅動,很多新手對此不是很清楚,為了幫助大家解決這個難題,下面小編將為大家詳細講解,有這方面需求的人可以來學習下,希望你能有所收獲。
1.開發環境
操作系統:SylixOS
編程環境:RealEvo-IDE3.1.5
硬件平臺:SAMA5D2 Xplained開發板
2.EEPROM簡介
EEPROM,或寫作E2PROM,全稱電子抹除式可復寫只讀存儲器 (英語:Electrically-Erasable Programmable Read-Only Memory),是一種可以通過電子方式多次復寫的半導體存儲設備。相比EPROM,EEPROM不需要用紫外線照射,也不需取下,就可以用特定的電壓,來抹除芯片上的信息,以便寫入新的數據。
2.1 存儲結構及設備地址
本篇使用的EEPROM芯片型號是AT24MAC402,該芯片提供2Kbit串行電可擦除可編程的存儲單元,即256 bytes,并可通過I2C兼容的串行接口(TWI)進行讀寫操作。此外,AT24MAC402可用來存放全球唯一的MAC或EUI地址(EUI-48)。其內部存儲組織結構如圖 2-1所示。
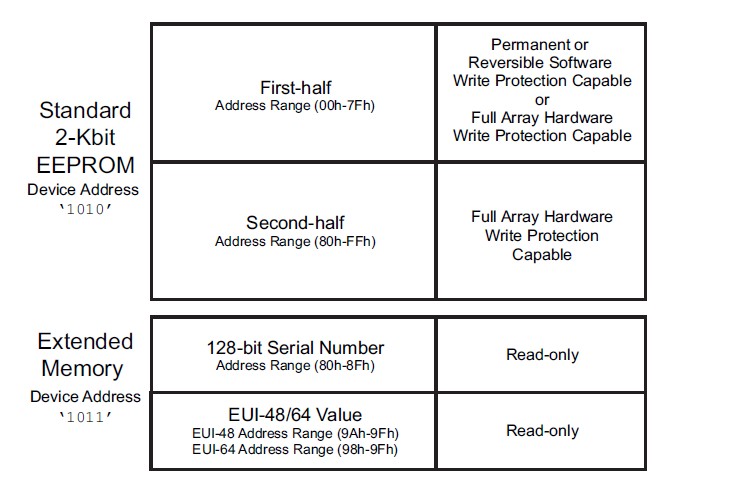
圖 2-1 AT24MAC402內部存儲結構
由圖 2-1可知,AT24MAC402提供了128-bit Serial Number和48-bit(9Ah-9Fh)的擴展存儲部分用來存儲序列號和全球唯一的MAC或EUI地址。作為I2C從設備,可通過兩個不同的設備地址訪問EEPROM的這兩部分(標準和擴展)的內部存儲地址。AT24MAC402的芯片手冊對這兩部分的編址如圖 2-2所示。

圖 2-2 設備地址
其中Bit[3:1]由硬件引腳電平決定,在沒有設置寫保護的情況下,對于標準EEPROM可進行讀寫操作,而擴展部分僅支持讀操作。SAMA5D2開發板EEPROM的電路圖如圖 2-3所示。
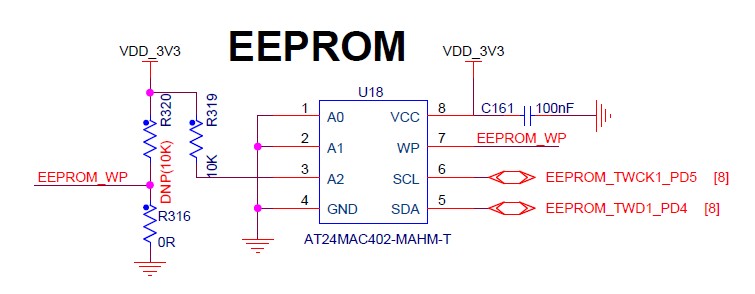
圖 2-3 EEPROM電路圖連線
結合圖 2-2可知EEPROM標準部分的設備地址是‘1010100’,即0x54;擴展部分的設備地址是‘1011100’,即0x5C。
2.2 操作模式
2.2.1 讀操作
標準EEPROM部分和擴展部分均支持讀操作,EEPROM支持以下三種類型的讀操作:
當前地址讀:在當前地址讀操作方式時無需發送讀字節地址,每次只將當前地址所存數據讀出,片內地址始終保持自加,直到讀完整個EEPROM后又回到0地址。
隨機地址讀:主設備發送有效從設備內部地址,并且從設備發送響應信號后將會將該內部地址處的數據通過I2C發送給主設備。
順序讀:多字節連續讀操作既可以是當前地址讀,也可以是隨機地址讀,每次處理器接收到一字節數據都返回一個ACK,EEPROM接收到此ACK后會自動地址加1,接著輸出下一個字節數據,直到處理器返回NO ACK時,讀過程結束。
2.2.2 寫操作
標準EEPROM部分,在寫保護被禁止的情況下提供寫操作,并且支持以下兩種寫操作:
字節寫:按字節寫時通常在向EEPROM發送設備地址并收到應答信號后,發送寫字節地址再次收到ACK后開始寫數據,最后發送停止位結束寫操作。
頁寫:寫頁時EEPROM可一次連續寫入整頁數據(一頁為16字節)。其發地址過程與寫字節時完全相同。不同的是,當寫完一個數據字節后,處理器發不發停止狀態,而是在應答信號后繼續寫入數據,每一個字節接收完畢后,EEPROM都返回一個ACK,一直到寫完整頁。如果頁寫時寫入數超出該物理頁邊界,則超出數據將重新寫入頁首地址覆蓋之前所寫數據。
3.技術實現
本篇通過內核模塊的方式實現EEPROM的設備驅動。
EEPROM驅動的編寫同樣是實現設備文件操作控制塊結構體file_operations的成員函數,在EEPROM設備驅動中主要實現了__e2promOpen、__e2promClose、__e2promRead、__e2promWrite、__e2promIoctl函數功能,__e2promIoctl函數用來設置待訪問的EEPROM的內部地址。
應用程序可以通過訪問標準文件I/O函數來讀寫EEPROM設備,在讀寫EEPROM設備前,可調用lseek函數設置要讀/寫的eeprom內部寄存器地址,然后調用標準文件I/O對該內部地址進行讀/寫操作。
EEPROM的讀寫功能,實質上是調用I2C設備發送接口的方式實現的。這里使用字符驅動的框架來實現EEPROM的讀寫操作。由于標準EEPROM和擴展部分的設備地址不同,但是對這兩部分的操作是一樣的,因此本篇僅給出標準EEPROM設備的驅動實現。
標準EEPROM設備文件操作結構體如程序清單 3-1所示。
程序清單 3-1 e2prom設備文件操作集
/*********************************************************************************************************
** e2prom設備文件操作集
*********************************************************************************************************/
struct file_operations GfileOperate = {
.fo_open = __e2promOpen,
.fo_close = __e2promClose,
.fo_read = __e2promRead,
.fo_write = __e2promWrite,
.fo_ioctl = __e2promIoctl
}; 通過調用標準I/O函數,可最終調用到file_operations結構體中的對應的成員函數。
3.1 讀操作
__e2promRead讀取EEPROM內部數據,其實現如程序清單 3-2所示。
程序清單 3-2 __e2promRead實現
/*********************************************************************************************************
** 函數名稱: __e2promRead
** 功能描述: 讀取eeprom設備
** 輸 入 : pvArg 版本類型選擇參數
** pcBuffer 緩沖區
** stMaxByte 緩沖區大小
** 輸 出 : ERROR
*********************************************************************************************************/
static ssize_t __e2promRead(PVOID pvArg, PCHAR pcBuffer, size_t stMaxByte)
{
UINT32 uiRet;
if(!pcBuffer) {
return PX_ERROR;
}
uiRet = __at24xxRead(Gi2cDev, Goffset, (UINT8 *)pcBuffer, stMaxByte);
Goffset = (Goffset + stMaxByte) % EEPROM_MEM_SIZE; /* 內部地址計數器保存值 */
return (uiRet == ERROR_NONE) ? stMaxByte:PX_ERROR;
}__e2promRead將會調用at24xxRead函數實現讀操作,at24xxRead實現如程序清單 3-3所示。
程序清單 3-3 at24xxRead實現
/*********************************************************************************************************
** 函數名稱: __at24xxRead
** 功能描述: AT24xx 寄存器讀函數
** 輸 入 : pI2cDev i2c設備
** RegAddress 寄存器地址
** buf 數據接收緩沖區
** len 需要讀取的數據長度
** 輸 出 : 返回 0 表示函數執行成功
*********************************************************************************************************/
static int __at24xxRead (PLW_I2C_DEVICE pI2cDev, UINT8 ucRegAddress, UINT8 *ucBuf, UINT uiLen)
{
INT iError;
LW_I2C_MESSAGE i2cMsgs[2] = {
{
.I2CMSG_usAddr = pI2cDev->I2CDEV_usAddr,
.I2CMSG_usFlag = 0, /* 0表示寫操作 */
.I2CMSG_usLen = sizeof(ucRegAddress),
.I2CMSG_pucBuffer = &ucRegAddress, /* 先寫要讀的寄存器地址 */
},
{
.I2CMSG_usAddr = pI2cDev->I2CDEV_usAddr,
.I2CMSG_usFlag = LW_I2C_M_RD, /* 表示讀操作 */
.I2CMSG_usLen = uiLen,
.I2CMSG_pucBuffer = ucBuf, /* 接著讀操作 */
}
};
iError = API_I2cDeviceTransfer(pI2cDev, i2cMsgs, 2);
if (iError < 0) {
return (PX_ERROR);
}
return (ERROR_NONE);
} 實質上,應用層調用read函數,最終是調用的API_I2cDeviceTransfer函數實現接收與發送操作。
3.2 寫操作
__e2promWrite向EEPROM寫入數據,其實現如程序清單 3-4所示。
程序清單 3-4 e2promWrite實現
/*********************************************************************************************************
** 函數名稱: __e2promWrite
** 功能描述: 寫eeprom設備
** 輸 入 : pvArg 版本類型選擇參數
** pcBuffer 緩沖區
** stMaxByte 緩沖區大小
** 輸 出 : ERROR
*********************************************************************************************************/
static ssize_t __e2promWrite(PVOID pvArg, PCHAR pcBuffer, size_t stMaxByte)
{
UINT32 uiRet;
if(!pcBuffer) {
return PX_ERROR;
}
uiRet = __at24xxWrite (Gi2cDev, Goffset, (UINT8 *)pcBuffer, stMaxByte);
Goffset = (Goffset + stMaxByte) % EEPROM_MEM_SIZE; /* 內部地址計數器保存值 */
return (uiRet == ERROR_NONE) ? stMaxByte:PX_ERROR;
}__e2promWrite將會調用at24xxWrite函數實現EEPROM的寫操作,at24xxWrite實現如程序清單 3-5所示。
程序清單 3-5 at24xxWrite實現
/*********************************************************************************************************
** 函數名稱: __at24xxWrite
** 功能描述: AT24xx 寄存器寫函數
** 輸 入 : pI2cDev i2c設備
** RegAddress 寄存器地址
** buf 需要寫入寄存器的數據
** len 寫入數據長度
** 輸 出 : 返回 0 表示函數執行成功
*********************************************************************************************************/
static int __at24xxWrite (PLW_I2C_DEVICE pI2cDev, UINT8 ucRegAddress, UINT8 *ucBuf, UINT uiLen)
{
INT iError;
if(!pI2cDev) {
return PX_ERROR;
}
/*
* 發送緩存大小:至少為(數據+地址)字節數
*/
UINT8 *pui2cBuf = (UINT8 *)malloc(uiLen+1);
LW_I2C_MESSAGE i2cMsgs[1] = {
{
.I2CMSG_usAddr = pI2cDev->I2CDEV_usAddr,
.I2CMSG_usFlag = 0, /* 0表示寫操作 */
.I2CMSG_usLen = uiLen + sizeof(ucRegAddress), /* (數據+地址)字節數 */
.I2CMSG_pucBuffer = pui2cBuf,
},
};
/*
* 發送緩存開頭存放的是地址信息,然后才是數據
*/
pui2cBuf[0] = ucRegAddress;
memcpy(&pui2cBuf[1], &ucBuf[0], uiLen);
iError = API_I2cDeviceTransfer(pI2cDev, i2cMsgs, 1);
if (iError < 0) {
free(pui2cBuf);
printk(KERN_ERR "__at24xxWrite(): failed to i2c transfer!\n");
return (PX_ERROR);
}
free(pui2cBuf);
return (ERROR_NONE);
} 實質上,應用層調用write函數,最終是調用的API_I2cDeviceTransfer函數實現接收與發送操作。
3.3 設置讀寫地址
通過實現__e2promIoctl函數,完成設置待讀/寫的EEPROM的內部寄存器地址,其實現如程序清單 3-6所示。
程序清單 3-6 __e2promIoctl實現
/*********************************************************************************************************
** 函數名稱: __e2promIoctl
** 功能描述: 控制eeprom設備
** 輸 入 : pdevhdrHdr 設備頭
** iCmd 命令
** lArg 命令參數
** 輸 出 : ERROR
*********************************************************************************************************/
static INT __e2promIoctl(PLW_DEV_HDR pdevhdrHdr, INT iCmd, LONG lArg)
{
INT iError;
struct stat *pstat;
switch(iCmd) {
case FIOSEEK: /* 獲取e2prom內部地址偏移 */
Goffset = *(off_t *)lArg;
break;
case FIOFSTATGET: /* 獲得文件屬性 */
pstat = (struct stat *)lArg;
pstat->st_dev = (dev_t)pdevhdrHdr;
pstat->st_ino = (ino_t)0; /* 相當于唯一節點 */
pstat->st_mode = 0644 | S_IFCHR; /* 默認屬性 */
pstat->st_nlink = 1;
pstat->st_uid = 0;
pstat->st_gid = 0;
pstat->st_rdev = 1;
pstat->st_size = 0;
pstat->st_blksize = 0;
pstat->st_blocks = 0;
pstat->st_atime = API_RootFsTime(LW_NULL); /* 默認使用 root fs 基準時間 */
pstat->st_mtime = API_RootFsTime(LW_NULL);
pstat->st_ctime = API_RootFsTime(LW_NULL);
break;
default:
errno = ENOSYS;
iError = PX_ERROR;
break;
}
return ERROR_NONE;
} 通過在應用層調用lseek,可以調用到底層的__e2promIoctl函數,在__e2promIoctl函數中通過給全局變量Goffset賦值,在調用read/write函數時,底層相應的__e2promRead/ __e2promWrite便可獲得Goffset的偏移值,進而讀取/寫入到EEPROM內部寄存器中。
3.4 驅動模塊初始化及卸載
驅動模塊初始化實現如程序清單 3-7所示。
程序清單 3-7 模塊初始化
/*********************************************************************************************************
** 函數名稱: module_init
** 功能描述: 驅動加載模塊
** 輸 入 : NONE
** 輸 出 : ERROR_CODE
*********************************************************************************************************/
int module_init (void)
{
printk("hello_module init!\n");
INT iDrvNum = API_IosDrvInstallEx(&GfileOperate); /* 安裝驅動程序 */
API_IosDevAdd (&GdevhdrHdr, "/dev/eeprom", iDrvNum); /* 安裝設備 */
Gi2cDev = API_I2cDeviceCreate("/bus/i2c/1",
"/dev/eeprom",
DEVICE_ADDR,
0);
return ERROR_NONE;
}模塊卸載實現如程序清單 3-8所示。
程序清單 3-8 模塊卸載
/*********************************************************************************************************
** 函數名稱: module_exit
** 功能描述: 驅動卸載模塊
** 輸 入 : NONE
** 輸 出 : NONE
*********************************************************************************************************/
void module_exit (void)
{
printk("hello_module exit!\n");
API_IosDevDelete(&GdevhdrHdr); /* 刪除設備 */
API_I2cDeviceDelete(Gi2cDev); /* 刪除指定的 i2c 設備 */
return ;
}看完上述內容是否對您有幫助呢?如果還想對相關知識有進一步的了解或閱讀更多相關文章,請關注億速云行業資訊頻道,感謝您對億速云的支持。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





