溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
激光雷達
? ? ? ? 隨著智能駕駛技術的發展,激光雷達迅速的進入工程師的視野,不管是機械式、MEMS還是純固態激光雷達,本質上都是以一定的速度掃描照射區域,在此過程中激光雷達不斷的發出激光并接收反射信息。激光雷達的反射點信息包含了距離、時間和水平角度(Azimuth)等信息,同時結合激光發射器的固定垂直角度,即可以計算出反射點的坐標信息,每一次掃描中所有反射點的集合即為點云(Point Cloud)。而伴隨著激光雷達的高精度帶來的數據量爆發,點云數據的實時處理就成為工程師要面對的一大挑戰。
?? ? ? ??當前階段工程師處理點云的校準、分類和分割等任務。利用PCL(點云庫)我們可以實現抽取點云特征、處理目標分類、目標分割及可視化等需求。同時在處理點云數據的同時也需要同步的考慮其他信號的接入,如視頻、毫米波、各類總線信號等。
?? ? ? ??因此能否有合適的工具既可以同步的采集所需的各種數據,又能夠方便的支撐工程師去進行開發,就是智能駕駛開發工程師需要直接面對的一個問題。
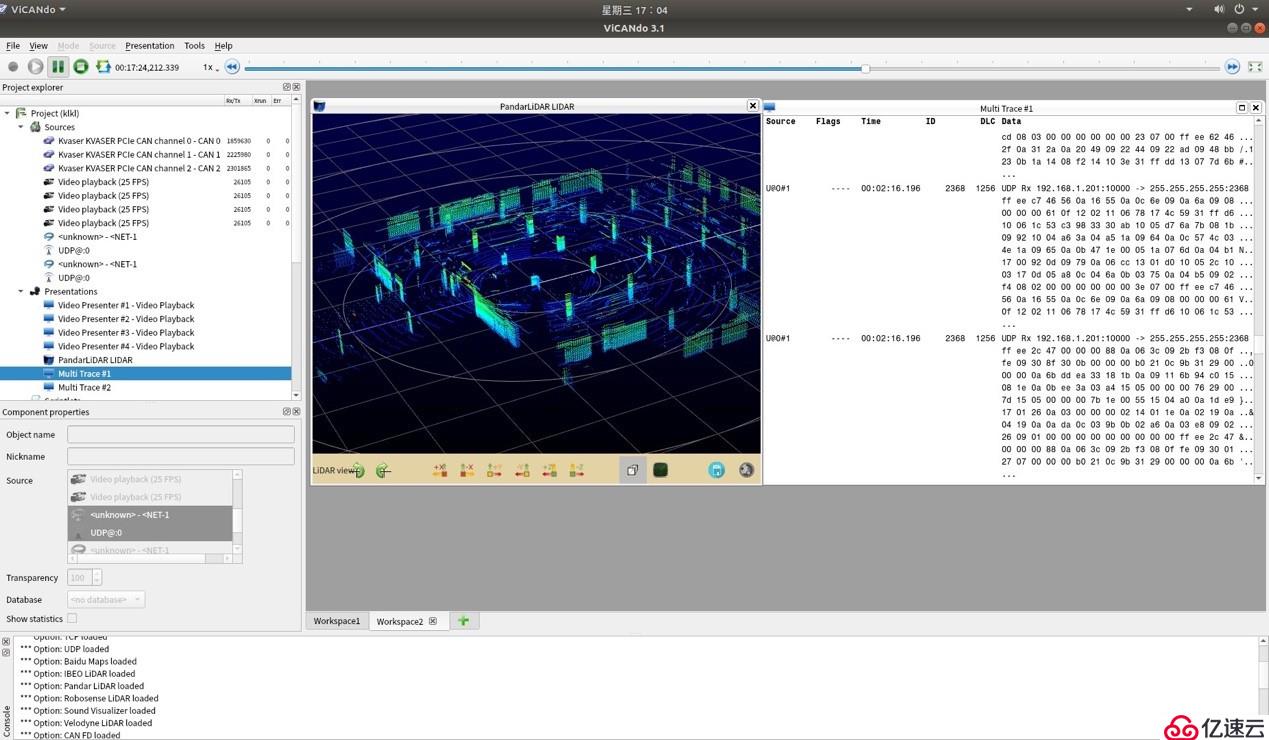
點云數據實時處理
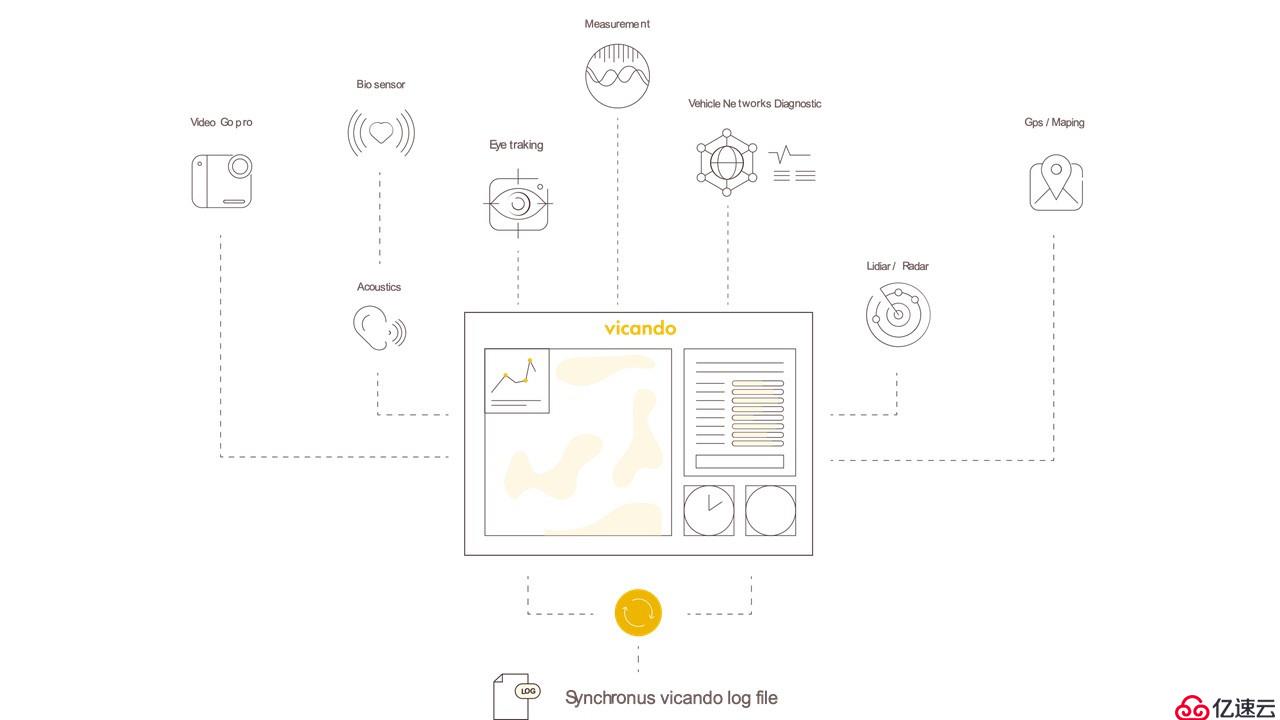
? ? ? ??ViCANdo Suite是針對智能駕駛功能的開發和測試平臺,能夠同步的采集所需的各類數據,包括但不限于如下列表中的數據源,同時工具集成PCL(點云庫),工程師可以直接使用PCL來進行相關的開發。
ViCANdo Suite直接支持的數據源:
?


????示例應用:LIDAR點云數據處理
? ?????地面點云(平面)分割,系統采用兩個16線激光雷達
? ?????目的:LIDAR探測到的點云中有相當數量是地面信號,不利于障礙物識別,且增加計算負擔
? ?????方法:RANSAC(隨機采樣一致性)?
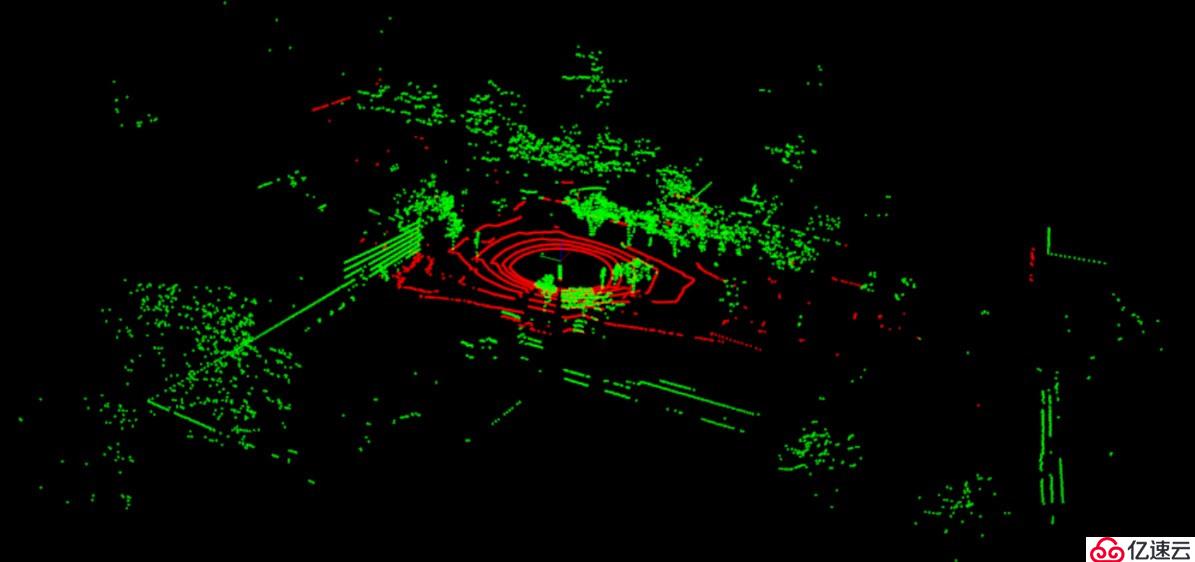
pcl::SACSegmentation
????示例應用:障礙物聚類
? ?????方法:Euclidean聚類(只考慮空間距離或考慮intensity等額外條件)?
?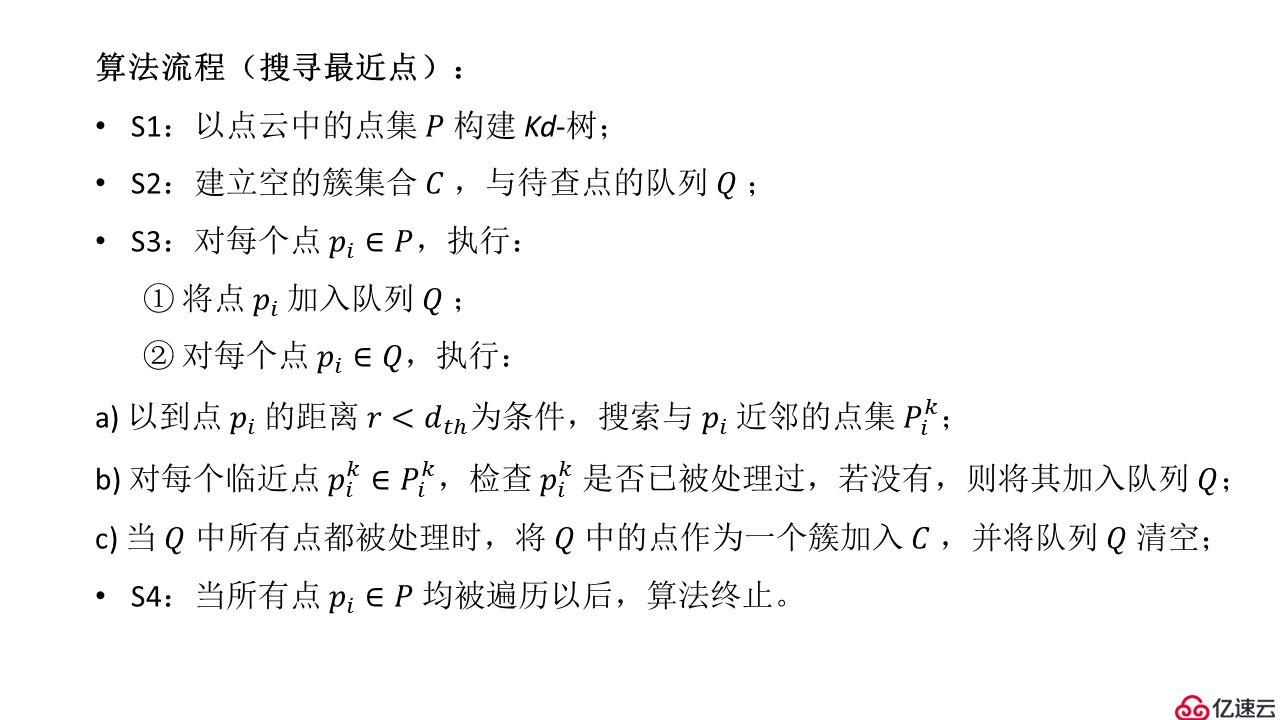

只考慮距離
pcl::EuclideanClusterExtraction
?
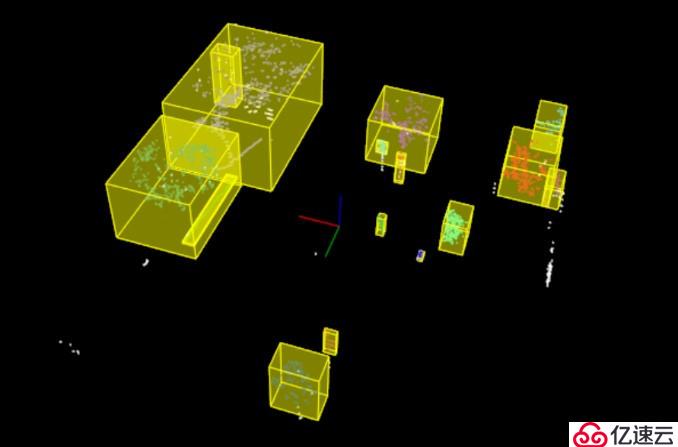
考慮距離和強度
intensitypcl::ConditionalEuclideanClustering
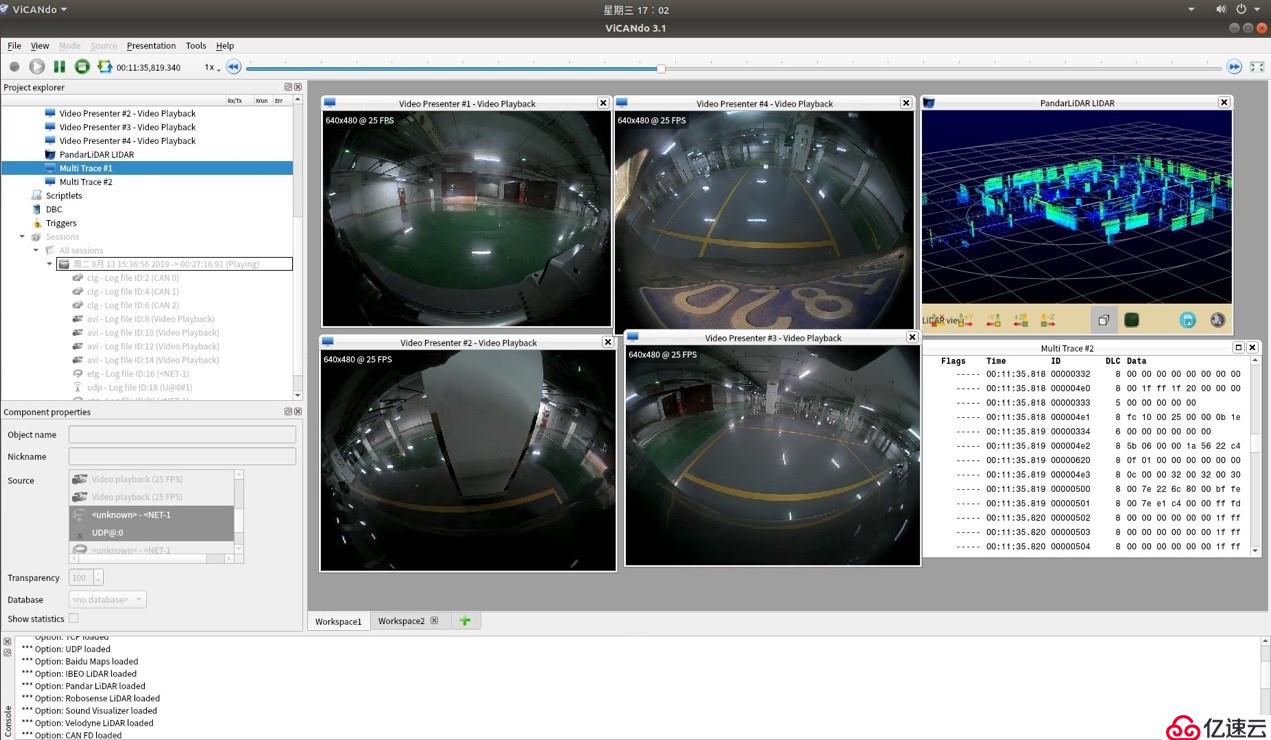
????示例應用:ViCANdo的點云/視頻顯示處理界面
ViCANdo Suite 產品介紹
? ? ? ??ViCANdo Suite是針對智能駕駛功能的開發和測試平臺軟件套裝。?
?軟件包含如下組件:?

????ViCANdo:
? ? ? ??ViCANdo是一款跨平臺的,針對AD/ADAS開發的數據記錄和分析工具,支持運行在Windows、Linux、MacOS等操作系統,支持X86、ARM等平臺。
????ViCANlog:
? ? ? ??設計用于車端路試采集的軟件,可以運行在任何基于linux的硬件設備上,無人值守采集數據。除了一般計算機外,也支持Nvidia TX-2、Xavier,Nexcom等設備。
????ViCANdroid:
? ? ? ??安卓端的APP,可以采集CAN總線和視頻、音頻、GPS等數據,內建FTP服務,可以自動的上傳數據到服務器。便于方便的對數據進行處理分析。
????ViCANsim:
? ? ? ??通過與OpenCV和Matlab/Simulink?等的集成,方便用戶部署自己的算法在ViCANsim上,于此同時也具有與Matlab/Simulink?的接口。
????ViCANbedded:
? ? ? ??ViCANbedded的目標是應用與嵌入式環境,與ViCANdo 相同。它旨在輕松地將源代碼從 PC 平臺移植到到嵌入式環境。目前,它可支持 QTEmbedded 4.X及更高版本、QNX、Velocity、VxWorks等。

經緯恒潤
北京市海淀區知春路7號致真大廈D座6層
電話:010-64840808
郵箱:market_dept@hirain.com
網址:www.hirain.com
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





