溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
https://www.toutiao.com/a6714594255387492878/

對于自動駕駛系統,如果將感知模塊比作人的眼睛和耳朵,那么決策規劃模塊就是自動駕駛的大腦。
大腦在接收到傳感器的各種感知信息之后,對當前環境作出分析,然后下達命令到底層控制模塊。
這個過程就是決策規劃模塊的主要任務。
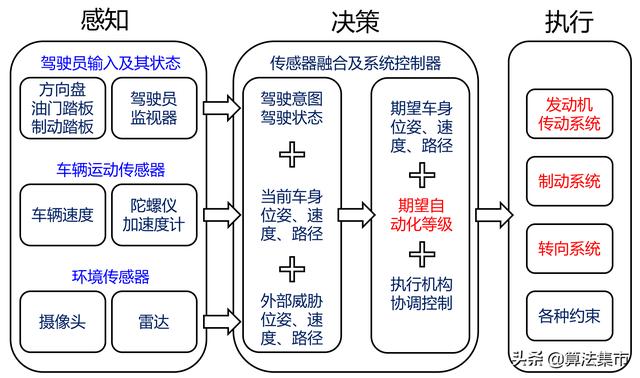
典型的決策規劃模塊可分為三個層次:
全局路徑規劃是指:在收到一個目的地信息后,結合高精度地圖信息和本車的當前位姿信息,生成一條最優的全局路徑,作為后續局部路徑規劃的參考和引導。
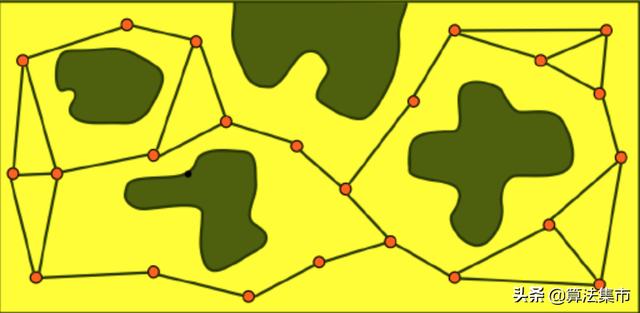
這里的“最優”可以指路徑最短、時間最快或必須經過指定點等條件。常見的全局路徑規劃算法包括Dijkstra、A-Star算法,以及在這兩種算法基礎上的多種改進。
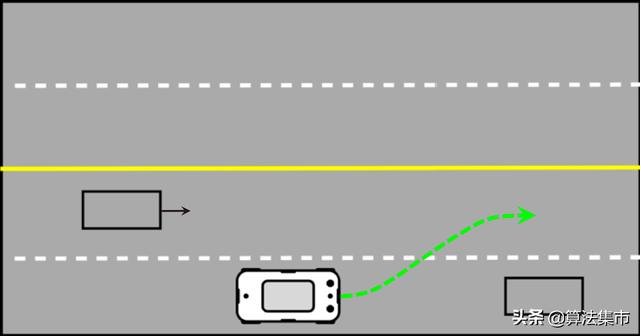
行為決策層是指:在接收到全局路徑后,根據從感知模塊得到的環境信息(其他車輛、行人等障礙物信息,道路上交通標志、紅綠燈等交通規則信息),以及本車當前的行駛路徑等狀態信息,作出具體的行為決策(如變道超車、跟車行駛、讓行、停車、進出站等);
行為決策層用的較多的算法包括:有限狀態機、決策樹、基于規則的推理模型等。
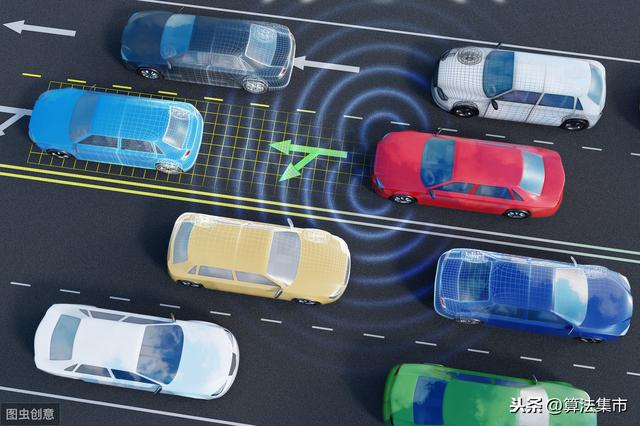
該層有三個難題需要解決:
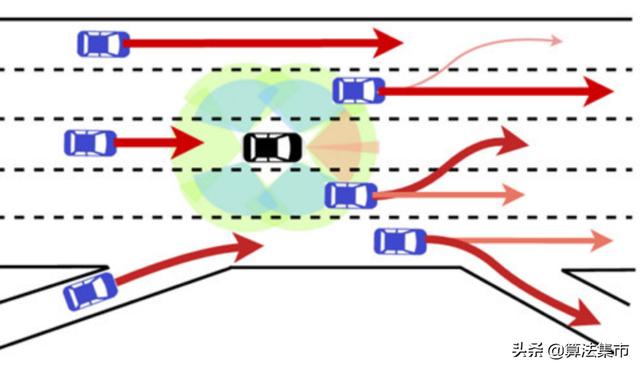
運動規劃是指:根據具體的行為決策,生成一條滿足各種約束條件(如安全性、平順性、車輛本身的動力學約束等)的軌跡,該軌跡作為控制模塊的輸入決定車輛的行駛路徑。
運動規劃可進一步分為局部路徑規劃和速度規劃,即將“行為”轉化成一條更加具體的行駛“軌跡”,從而能夠生成一系列控制信號(加速度、方向盤轉角、檔位、燈光等), 實現車輛的自動行駛。
局部路徑規劃和速度規劃算法,常用的有基于搜索的規劃算法,基于采樣的規劃算法,以及直接優化的方法。
基于S-T圖的速度規劃介紹-Apollo學習筆記
自動駕駛系統的決策技術介紹-Apollo學習筆記
無人車的避障系統介紹:障礙物的檢測、軌跡預測和避障路徑生成
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





