溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要為大家展示了“opencv3/C++中基于顏色實現目標跟蹤的方式”,內容簡而易懂,條理清晰,希望能夠幫助大家解決疑惑,下面讓小編帶領大家一起研究并學習一下“opencv3/C++中基于顏色實現目標跟蹤的方式”這篇文章吧。
inRange函數
void inRange(InputArray src, InputArray lowerb, InputArray upperb, OutputArray dst);
src:輸入圖像;
lowerb:下邊界數組,閾值下限;
upperb:上邊界數組,閾值上限;
dst:輸出圖像;
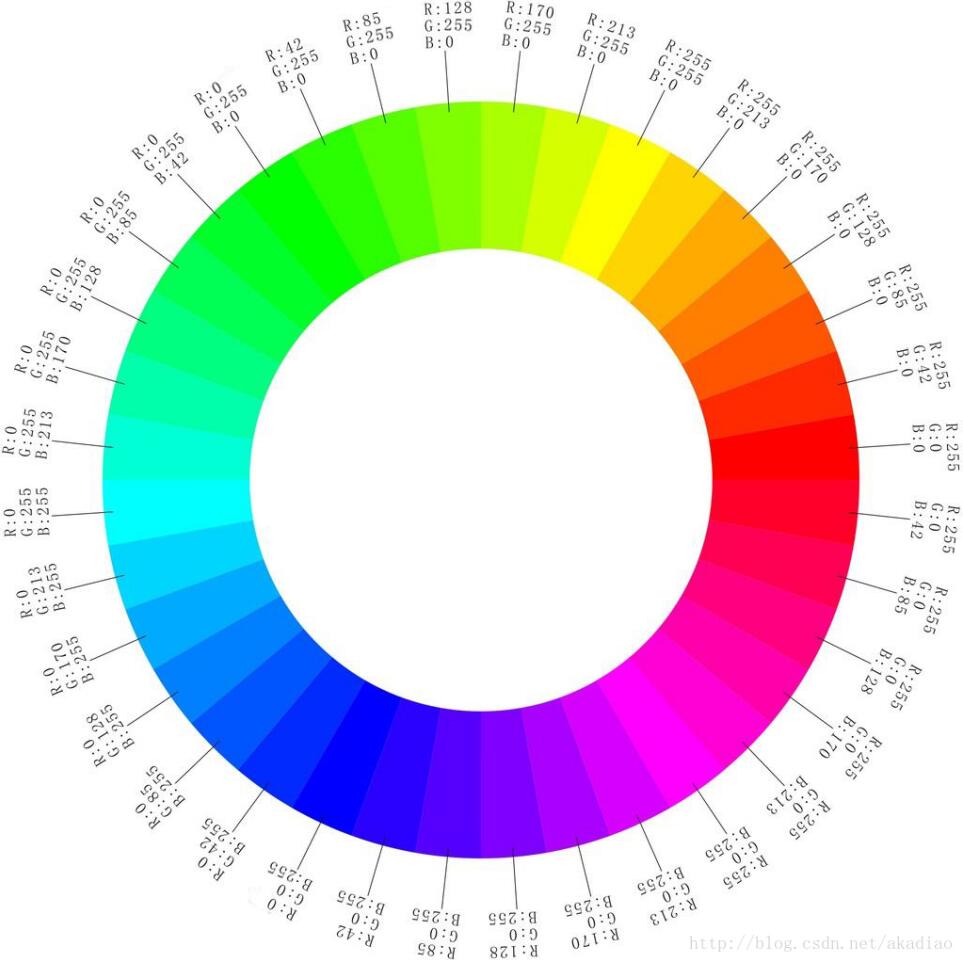
顏色范圍如圖:
示例:
捕獲攝像頭中的黃色方塊
#include<opencv2/opencv.hpp>
using namespace cv;
int main()
{
VideoCapture capture;
capture.open(0);
if(!capture.isOpened())
{
printf("can not open video file \n");
return -1;
}
Mat frame, dst;
Mat kernel;
//開操作處理
kernel = getStructuringElement(MORPH_RECT, Size(5, 5));
namedWindow("input", CV_WINDOW_AUTOSIZE);
namedWindow("output", CV_WINDOW_AUTOSIZE);
std::vector<std::vector<Point>> contours;
std::vector<Vec4i> hireachy;
Rect rect;
Point2f center;
float radius=20;
while (capture.read(frame))
{
//blur(frame, dst, Size(5,5));
inRange(frame, Scalar(0,80,80), Scalar(50,255,255), dst);
//開操作
morphologyEx(dst,dst,MORPH_OPEN,kernel);
//獲取邊界
findContours(dst, contours, hireachy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0,0));
//框選面積最大的邊界
if (contours.size() > 0)
{
double maxArea=0;
for (int i = 0; i < contours.size(); i++)
{
double area = contourArea(contours[static_cast<int>(i)]);
if (area > maxArea)
{
maxArea = area;
rect = boundingRect(contours[static_cast<int>(i)]);
minEnclosingCircle(contours[static_cast<int>(i)], center, radius);
}
}
}
//矩形框
//rectangle(frame,rect, Scalar(0,255,0),2);
//圓形框
circle(frame, Point(center.x,center.y), (int)radius, Scalar(0,255,0), 2);
imshow("input", frame);
imshow("output", dst);
waitKey(100);
}
capture.release();
return 0;
}
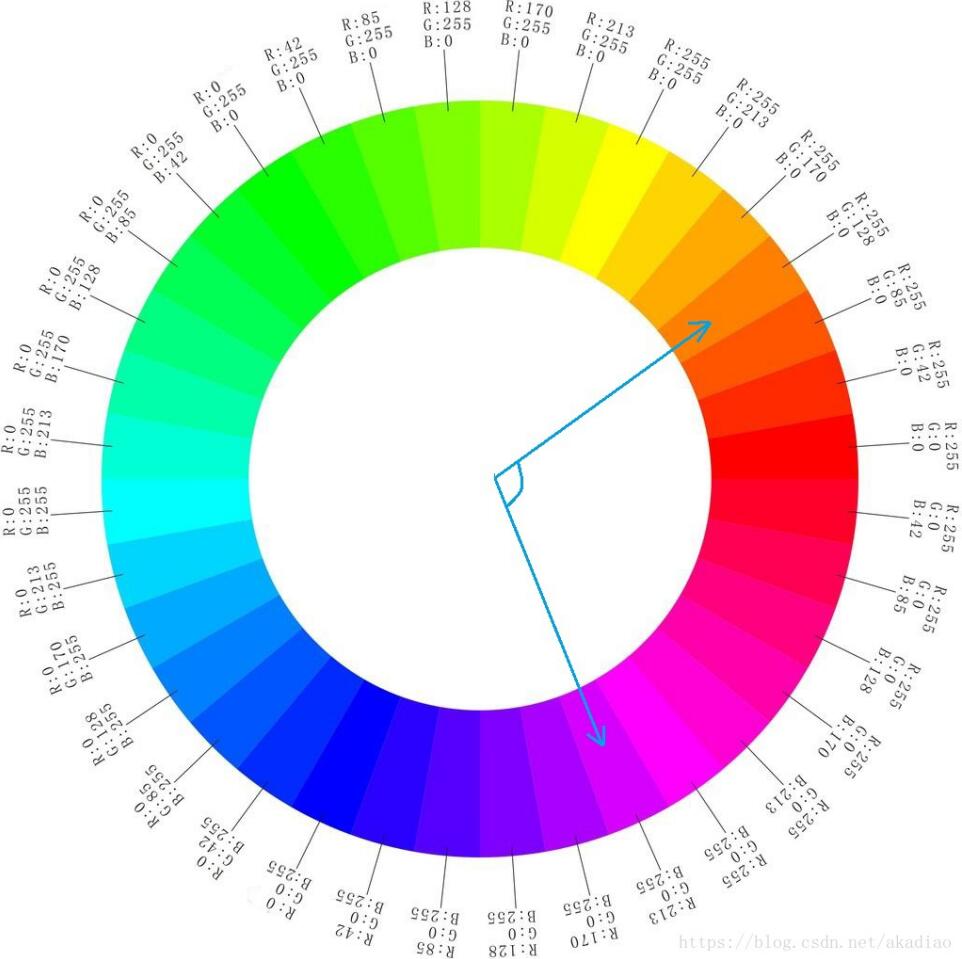
關于顏色范圍的選取:
有朋友問顏色范圍的事,比如我們選擇某個偏紅色的范圍,如色環圖中這個區間即BGR(0,128,255)到BGR(255,0,213);則B、G、R這三個通道的范圍分別為0-255,0-128,213-255。因此閾值下限lowerb=Scalar(0,0,213),閾值上限upperb=Scalar(255,128,255)。
以上是“opencv3/C++中基于顏色實現目標跟蹤的方式”這篇文章的所有內容,感謝各位的閱讀!相信大家都有了一定的了解,希望分享的內容對大家有所幫助,如果還想學習更多知識,歡迎關注億速云行業資訊頻道!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





