溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章主要介紹OpenCV如何實現幀間差分法,文中介紹的非常詳細,具有一定的參考價值,感興趣的小伙伴們一定要看完!
具體內容如下
一.基本概念
基于視頻的車輛檢測算法種類很多:光流法檢測,幀差法,背景消除法(其中包括:直方圖法,平均值法,單分布和混合高斯分布背景模型,Kalman濾波等),邊緣檢測法,運動矢量檢測法...下面分享的是運動目標檢測算法中最基本的方法—幀間差分法。
相鄰幀間圖像差分思想:檢測出了相鄰兩幀圖像中發生變化的區域。該方法是用圖像序列中的連續兩幀圖像進行差分,然后二值化該灰度差分圖像來提取運動信息。由幀間變化區域檢測分割得到的圖像,區分出背景區域和運動車輛區域,進而提取要檢測的車輛目標。
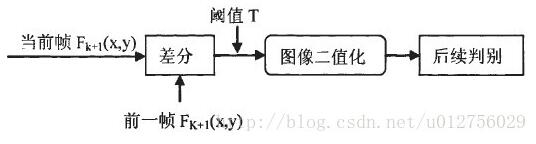
它是通過比較圖像序列中前后兩幀圖像對應像素點灰度值的不同,通過兩幀相減,如果灰度值很小,可以認為該點無運動物體經過;反之灰度變化很大,則認為有物體經過。第k幀和k+1幀圖像fk(x,y),fk+l(x,y)之間的變化用一個二值差分圖像D(x,y)表示,如式:

二值圖中0對應前后未變化的地方,1對應變化的地方。流程圖如下圖所示:
幀差法的特點是實現簡單,運算速度快,對于動態環境自適應性是很強的,對光線的變化不是十分的敏感。但是在運動體內易產生空洞.特別是目標運動速度較快時,影響目標區域準確提取。我們以年輛檢測為例,車輛檢測除了要檢測出運動車輛.同時還要檢測出暫時停止的車輛,在這個方面,此類方法無能為力。而且如果車輛的體積較大,那么車輛在前后幀中根容易產生重疊部分,尤其是大貨車,這使得幀問差分的結果主要為車頭和車尾。車輛中間部分的差分值相對報小.形成空洞,不利于檢測。
二.程序源代碼
#include "stdafx.h"
#include "highgui.h"
#include "cxcore.h"
#include "ml.h"
#include "cv.h"
void main()
{
CvCapture* capture;
capture=cvCaptureFromFile("video.avi");//獲取視頻
cvNamedWindow("camera",CV_WINDOW_AUTOSIZE);
cvNamedWindow("moving area",CV_WINDOW_AUTOSIZE);
IplImage* tempFrame;//用于遍歷capture中的幀,通道數為3,需要轉化為單通道才可以處理
IplImage* currentFrame;//當前幀
IplImage* previousFrame;//上一幀
/*
CvMat結構,本質上和IplImage差不多,但是因為IplImage里的數據只能用uchar的形式存放,當需要這些圖像數據看作數據矩陣來運算時,0~255的精度顯然滿足不了要求;
然而CvMat里卻可以存放任意通道數、任意格式的數據
*/
CvMat* tempFrameMat;
CvMat* currentFrameMat; //IplImage要轉成CvMat進行處理
CvMat* previousFrameMat;
int frameNum=0;
while(tempFrame=cvQueryFrame(capture))
{
//tempFrame=cvQueryFrame(capture);
frameNum++;
if(frameNum==1)
{
//第一幀先初始化各個結構,為它們分配空間
previousFrame=cvCreateImage(cvSize(tempFrame->width,tempFrame->height),IPL_DEPTH_8U,1);
currentFrame=cvCreateImage(cvSize(tempFrame->width,tempFrame->height),IPL_DEPTH_8U,1);
currentFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);
previousFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);
tempFrameMat=cvCreateMat(tempFrame->height, tempFrame->width, CV_32FC1);
//此時這些IplImage和CvMat都是空的,沒有存有數據
}
if(frameNum>=2)
{
cvCvtColor(tempFrame, currentFrame, CV_BGR2GRAY);//轉化為單通道灰度圖,此時currentFrame已經存了tempFrame的內容
/*
用cvConvert將IplImage轉為CvMat,接下來用cvAbsDiff對它們處理
經過轉換后,currentFrame沒有改變,但是tempFrameMat已經存了currentFrame的內容
*/
cvConvert(currentFrame,tempFrameMat);
cvConvert(previousFrame,previousFrameMat);
cvAbsDiff(tempFrameMat,previousFrameMat,currentFrameMat);//做差求絕對值
/*
在currentFrameMat中找大于20(閾值)的像素點,把currentFrame中對應的點設為255
此處閾值可以幫助把車輛的陰影消除掉
*/
cvThreshold(currentFrameMat,currentFrame,20,255.0,CV_THRESH_BINARY);
//cvConvert(currentFrameMat,currentFrame); //觀察不二值化的情況
cvDilate(currentFrame,currentFrame); //膨脹
cvErode(currentFrame,currentFrame); //腐蝕
cvFlip(currentFrame, NULL, 0); //垂直翻轉
//顯示圖像
cvShowImage("camera",tempFrame);
cvShowImage("moving area",currentFrame);
}
//把當前幀保存作為下一次處理的前一幀
cvCvtColor(tempFrame, previousFrame, CV_BGR2GRAY);
cvWaitKey(33);
}//end while
//釋放資源
cvReleaseImage(&tempFrame);
cvReleaseImage(&previousFrame);
cvReleaseImage(¤tFrame);
cvReleaseCapture(&capture);
cvReleaseMat(&previousFrameMat);
cvReleaseMat(¤tFrameMat);
cvDestroyWindow("camera");
cvDestroyWindow("moving area");
}以上是“OpenCV如何實現幀間差分法”這篇文章的所有內容,感謝各位的閱讀!希望分享的內容對大家有幫助,更多相關知識,歡迎關注億速云行業資訊頻道!
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





