溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
這篇文章將為大家詳細講解有關python+opencv如何實現車牌定位功能,小編覺得挺實用的,因此分享給大家做個參考,希望大家閱讀完這篇文章后可以有所收獲。
寫在前面
HIT大三上學期視聽覺信號處理課程中視覺部分的實驗三,經過和學長們實驗的對比發現每一級實驗要求都不一樣,因此這里標明了是2019年秋季學期的視覺實驗三。
由于時間緊張,代碼沒有進行任何優化,實驗算法僅供參考。
實驗要求
對給定的車牌進行車牌識別
實驗代碼
代碼首先貼在這里,僅供參考
源代碼
實驗代碼如下:
import cv2
import numpy as np
def lpr(filename):
img = cv2.imread(filename)
# 預處理,包括灰度處理,高斯濾波平滑處理,Sobel提取邊界,圖像二值化
# 對于高斯濾波函數的參數設置,第四個參數設為零,表示不計算y方向的梯度,原因是車牌上的數字在豎方向較長,重點在于得到豎方向的邊界
# 對于二值化函數的參數設置,第二個參數設為127,是二值化的閾值,是一個經驗值
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
GaussianBlur_img = cv2.GaussianBlur(gray_img, (3, 3), 0)
Sobel_img = cv2.Sobel(GaussianBlur_img, -1, 1, 0, ksize=3)
ret, binary_img = cv2.threshold(Sobel_img, 127, 255, cv2.THRESH_BINARY)
# 形態學運算
kernel = np.ones((5, 15), np.uint8)
# 先閉運算將車牌數字部分連接,再開運算將不是塊狀的或是較小的部分去掉
close_img = cv2.morphologyEx(binary_img, cv2.MORPH_CLOSE, kernel)
open_img = cv2.morphologyEx(close_img, cv2.MORPH_OPEN, kernel)
# kernel2 = np.ones((10, 10), np.uint8)
# open_img2 = cv2.morphologyEx(open_img, cv2.MORPH_OPEN, kernel2)
# 由于部分圖像得到的輪廓邊緣不整齊,因此再進行一次膨脹操作
element = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
dilation_img = cv2.dilate(open_img, element, iterations=3)
# 獲取輪廓
contours, hierarchy = cv2.findContours(dilation_img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 測試邊框識別結果
# cv2.drawContours(img, contours, -1, (0, 0, 255), 3)
# cv2.imshow("lpr", img)
# cv2.waitKey(0)
# 將輪廓規整為長方形
rectangles = []
for c in contours:
x = []
y = []
for point in c:
y.append(point[0][0])
x.append(point[0][1])
r = [min(y), min(x), max(y), max(x)]
rectangles.append(r)
# 用顏色識別出車牌區域
# 需要注意的是這里設置顏色識別下限low時,可根據識別結果自行調整
dist_r = []
max_mean = 0
for r in rectangles:
block = img[r[1]:r[3], r[0]:r[2]]
hsv = cv2.cvtColor(block, cv2.COLOR_BGR2HSV)
low = np.array([100, 60, 60])
up = np.array([140, 255, 255])
result = cv2.inRange(hsv, low, up)
# 用計算均值的方式找藍色最多的區塊
mean = cv2.mean(result)
if mean[0] > max_mean:
max_mean = mean[0]
dist_r = r
# 畫出識別結果,由于之前多做了一次膨脹操作,導致矩形框稍大了一些,因此這里對于框架+3-3可以使框架更貼合車牌
cv2.rectangle(img, (dist_r[0]+3, dist_r[1]), (dist_r[2]-3, dist_r[3]), (0, 255, 0), 2)
cv2.imshow("lpr", img)
cv2.waitKey(0)
# 主程序
for i in range(5):
lpr(str(i+1) + ".jpg")參數調整
上述代碼中,所有涉及到參數調整的函數,例如形態學操作,都需邊調整邊觀察當前參數下的運行結果,待本步運行結果較好時,再繼續寫下一步。
該代碼對具體圖片要求較高,不同的圖片可能無法成功識別車牌,此時可嘗試依次調整預處理部分,形態學部分,hsv檢測部分函數的參數
實驗結果



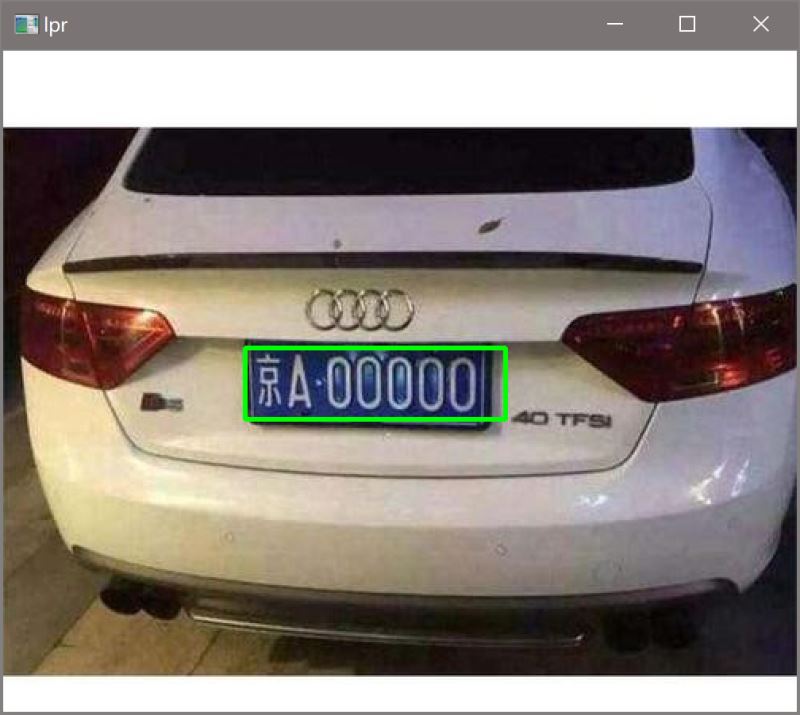
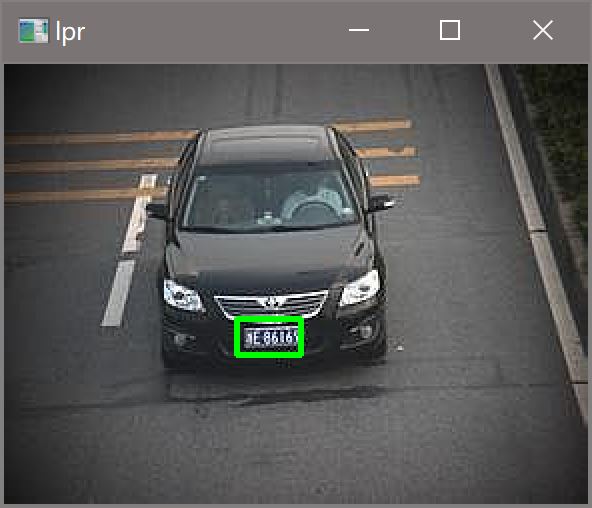
ps:圖五是最難識別的圖片,最后是通過調整hsv下限為[100, 60, 60]實現的
關于“python+opencv如何實現車牌定位功能”這篇文章就分享到這里了,希望以上內容可以對大家有一定的幫助,使各位可以學到更多知識,如果覺得文章不錯,請把它分享出去讓更多的人看到。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





