溫馨提示×
您好,登錄后才能下訂單哦!
點擊 登錄注冊 即表示同意《億速云用戶服務條款》
您好,登錄后才能下訂單哦!
不知大家是否還有印象,淘寶玩法平臺(一個內部系統)前不久發布了一款新的游戲 —— 小球入洞,該游戲伴隨著淘寶技術部去年雙 11 當天舉辦的一次抽獎活動,第一次在大家面前亮相。
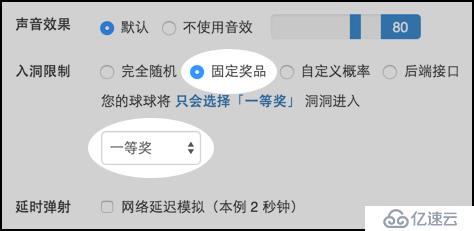
游戲支持預先設定必中獎項:離開發射器的小球在來回彈跳一陣之后,不偏不倚的落入到指定獎項對應的球洞中。體驗該功能,可在游戲測試頁右側選項區進行如下的設置:
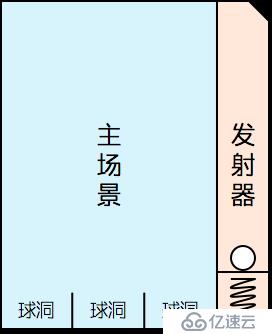
本文試著介紹游戲的這個「掉落至指定球洞」的功能,講的偏思路,并不涉及公式和代碼,我盡可能直白,如果你覺得晦澀,可以在評論處我們接著探討。在繼續之前,為了表達上的方便,我將對游戲在視覺上進行如下圖的劃分:
做過抽獎 UI 組件的同學都知道,抽獎結果一定是由后端計算之后返回的,原因主要有兩個:1)安全方面考慮,抽獎結果的產生過程不能在前端實現;2)只有中間服務才能更加準確的分配多端的抽獎結果。
鑒于此,所有抽獎 UI 組件都必須滿足:可事先抽得結果之后再播放動畫(顯示結果)。抽獎大轉盤便是一個很典型的例子,在轉盤滾動的時候,根據 AJAX 請求的返回,JS 其實已經知道它最終會停在哪個扇區上了。
小球入洞是一個抽獎類 UI 組件,所以當然也必須支持指定結果的抽獎,那么問題來了,小球的整個過程并不是一段簡單的動畫,怎么才能使之落入到指定球洞呢?
如上圖示意,游戲的主場景三面環壁(小球反彈),一面布滿小洞(小球穿過),由于重力的關系,小球在有限次碰撞彈跳之后,最終一定會通過下面的小洞穿出。
「落入指定球洞」自然成了完成該游戲的第一個也是最棘手的一個難點,因為小球從發射器射出時(離開×××區域瞬間),方向是確定的(水平向左),難以從指定球洞開始,逆向地推導運動路徑并使之最終以確定的方向(水平向右)進入發射器中,此方法非常容易導致路徑太長或者無解,尋路耗時將不可控。基于逆向推導在之前也嘗試過多種優化方案,均以失敗告終。
最終采用的方式是正向推導路徑科普,即:從離開發射器開始,模擬小球的物理運動,迭代式演算,找出一條剛好能穿過指定球洞的路徑。
受場景其它物體影響(碰撞),小球的運動路徑并不能用一個公式描述出來,它的整個過程應該由多段的拋物線組成,每一次碰撞都結束一段并開始一段新的路徑,所以需要迭代法逐幀推進,才能描繪出完整路徑,下圖是一條路徑的演算過程:
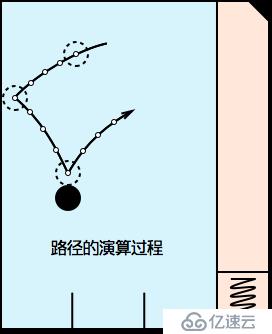
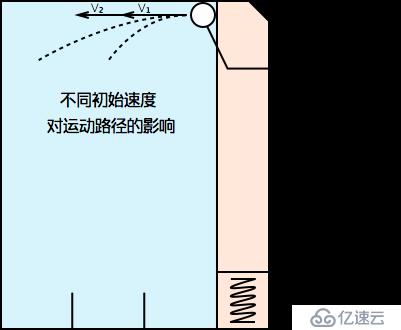
假設重力加速度、空氣阻力以及所有鋼體的彈性都是恒定的,并且墻壁和障礙物都靜止不動,小球在離開發射器之后,運動路徑就固定下來了。換句話說,影響小球軌跡的就只剩下小球離開發射器那一瞬間時的速度(離開瞬間的方向固定水平向左)。
讓小球落至指定球洞,起關鍵決定作用的就是離開發射器時的初始速度。如果能找出落向每個球洞所需的初始速度,問題就解決了。
不知怎么給這個含義扣個名堂,我估且稱之為暴破法吧,暴破即暴力破解,通常用于破解密碼,拿大量不同的鑰匙試開一把鎖,如果剛好其中一把鑰匙能打開鎖,那么暴破就成功了。
包括我在內的多數人,可能會認為暴破的時間成本很高,所以在最開始的思考中首先會自覺地把此方案屏蔽掉,在多次其它方案的實驗失敗后,我偶然一試此法,發現其實不然。
在本游戲中,我用不斷遞增的初始速度(鑰匙)來試算路徑,由于沒有 DOM 操作,且計算量并不是很大,很快就可以找出經過指定球洞(鎖)的其中一條路徑。
下圖是根據兩個不同初始速度試算出來的兩個不同結果:
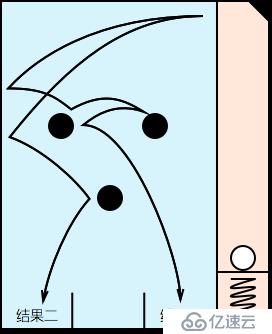
暴破的耗時有多方面的影響,本例中我用 2000 個不同的速度(從 13 到 15,步進為0.001),在某一次實驗中,跑了 10 萬次自動用例,平均一次搜索出結果嘗試次數(使用的初始速度的個數)是 11.6 次,平均一次搜索出結果用時只有 4.65ms,這個數值讓我很意外,幾乎沒有優化的必要。
在以上的 Demo 中,「搜索路徑」這個動作發生在玩家釋放彈簧之后,小球彈出之前,5ms 就消耗在這里,可以體會體會 :)
暴破有時可以成為迅速解決問題的有效手段,比起折騰 AI 來說更加節省研發成本,對于復雜度不高的小游戲,可行性還是滿高的,也因為沒有 DOM 操作,甚至可以放在 WebWorker 里面進行。
人機對戰的臺球游戲,機器的 AI 就完全可以使用此法。
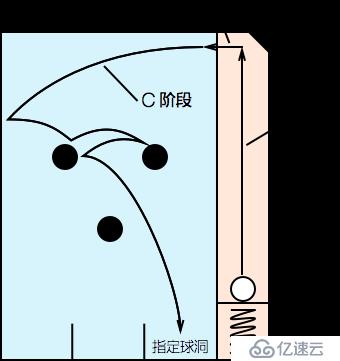
搜索路徑解決了,剩下的問題就簡單得多,小球的整個運動,在本游戲中我將之分成三個階段:
小球彈出后,來到發射器右上拐角之前,此為第一階段,為了簡便,下文記為 A 階段;
小球經過拐角后,離開發射器之前,此為第二階段,也就是 B 階段;
小球離開發射器,直到落洞結束,此為第三階段,C 階段;
三個階段如下圖所示:
前面探討的搜索路徑一直指的都是 C 階段,為了使整個動畫看起來連貫,小球的速度變化一定得平穩,也就是:C 階段開頭的瞬時速度,等于 B 階段結尾的瞬時速度;B 階段開頭的瞬時速度,等于 A 階段結尾的瞬時速度。
如果不考慮磨擦和撞擊后的動能衰減,其實階段 A 加階段 B 在速度變化上就是自由落體的逆過程,為了簡便,我將階段 A 和階段 B 做了合并,以同一個拋物線公式(自由落體)表示,根據 C 開頭的瞬時速度,可以生成 AB 的完整路徑,這樣就得到小球的整個運動路徑了,這個過程應該好理解,不再贅述。
由于必須落入指定球洞,所以 A 階段的初始速度自然也是固定的了,慢著!這里似乎有點兒不對勁?
彈簧的存在增加了整個過程的違合,正常人的理解,應該是彈簧壓縮得越厲害,小球射出時的初始速度越大,這跟合成路徑所需的初始速度不匹配:一個是變化的,一個是固定的。
有兩個解決辦法:
1)使階段 A 的初始速度受彈簧影響,利用階段 A 或階段 AB 的路程來逐漸消除該影響,使之看起來變化是平滑的;
2)分兩種情況:彈簧壓縮比小于 0.75 時(輕輕拉),小球初始速度受彈簧影響,但使小球彈射不成功(發出去又掉回來);彈簧壓縮比大于 0.75 時(用力拉),小球初始速度直接等于合成路徑所需的初始速度(正常發出去);
我采用的是后一種解決辦法,因為前一種在動畫上看起來反物理,似乎重力加速度是在變化的;而后一種方案至少彈簧壓縮比在 0-0.75 區間時都是正常的,而 0.75 以上實際體驗后違合感并不太明顯。
最后的這個問題其實正是因為非得「射入指定球洞」這件事情引起的,將這一枚小瑕疵掩藏于彈簧的這 25% 的空間里,個人感覺不算太破壞完美,所謂一快遮百丑,這就是現實版彈珠臺和電子版的區別。
免責聲明:本站發布的內容(圖片、視頻和文字)以原創、轉載和分享為主,文章觀點不代表本網站立場,如果涉及侵權請聯系站長郵箱:is@yisu.com進行舉報,并提供相關證據,一經查實,將立刻刪除涉嫌侵權內容。





